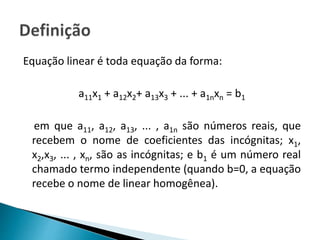
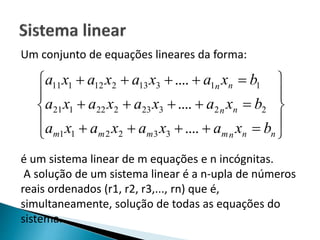
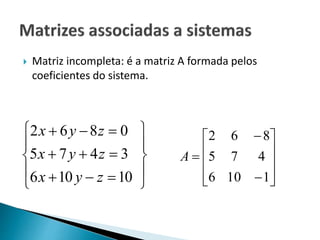
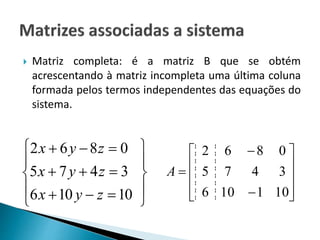
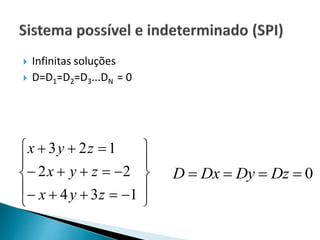
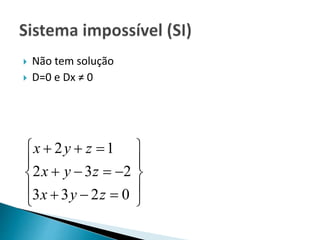
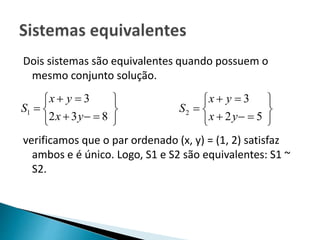
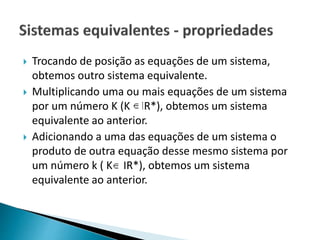
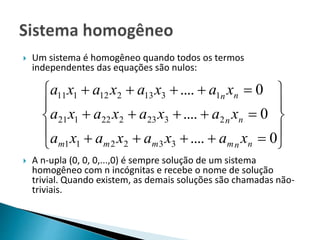
O documento define equação linear e sistema linear, explica como representá-los através de matrizes e classifica sistemas linear em possível e determinado, possível e indeterminado ou impossível. Também discute operações que geram sistemas equivalentes e a técnica de escalonamento para resolver sistemas lineares.