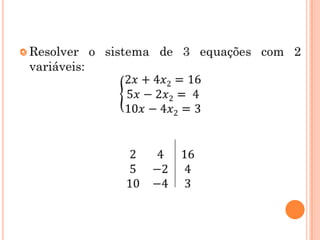
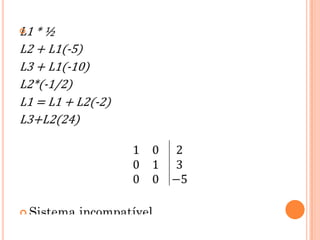
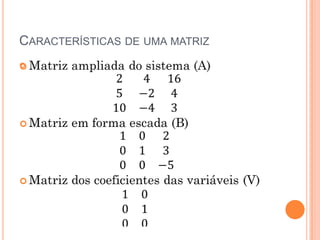
O documento discute resolução de sistemas lineares, explicando que a solução é o conjunto de valores que satisfazem simultaneamente as equações do sistema. Sistemas podem ser compatíveis (ter solução), incompatíveis (não ter solução) ou indeterminados (ter mais de uma solução). O método de Gauss para resolução envolve transformações elementares das equações.