Baixado 96 vezes
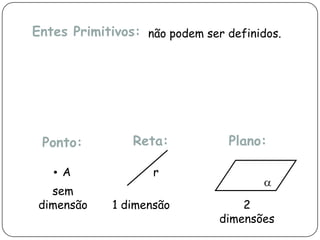
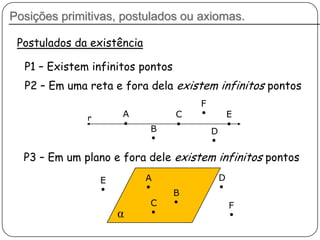
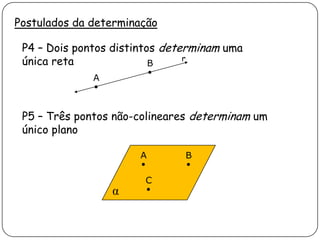
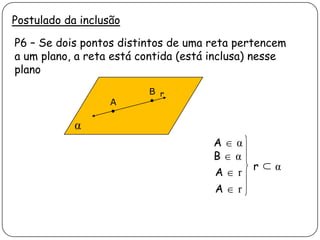
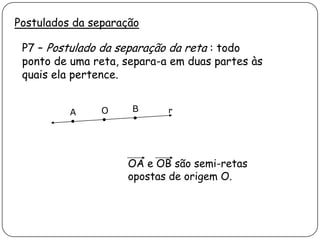
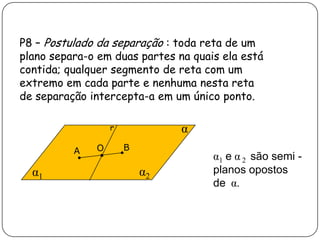
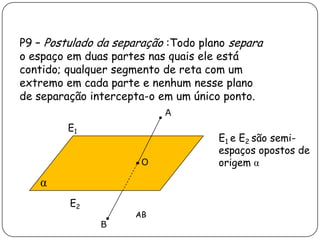
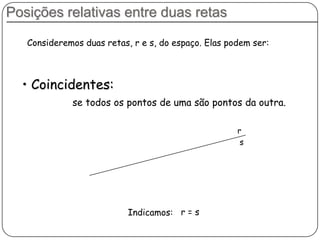
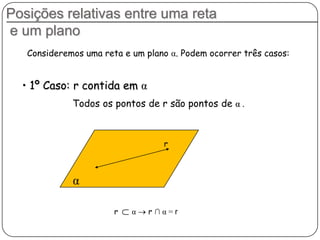
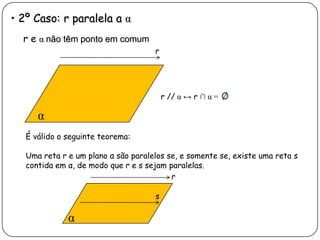
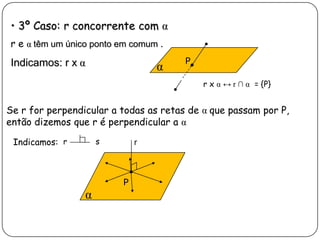
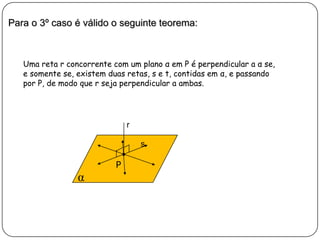
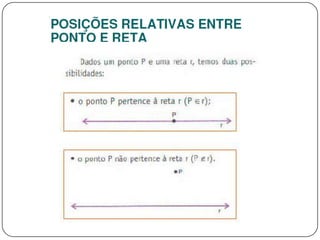
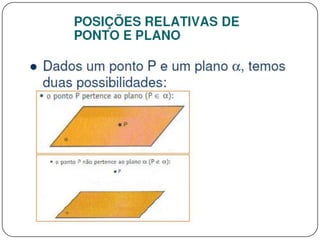
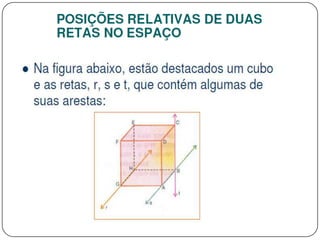
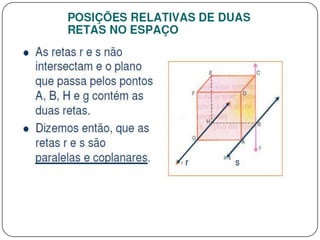
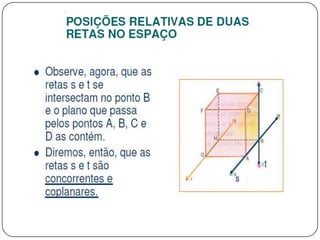
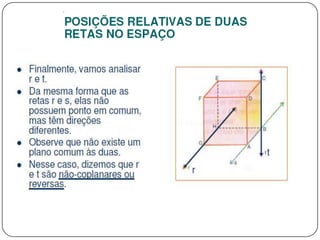
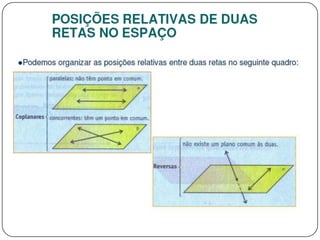
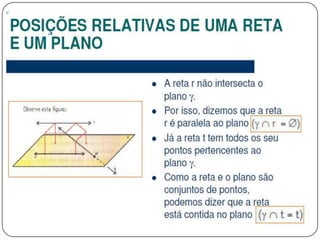
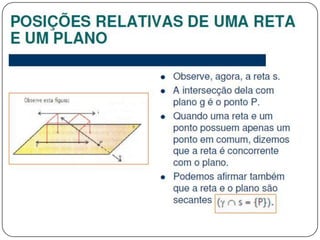
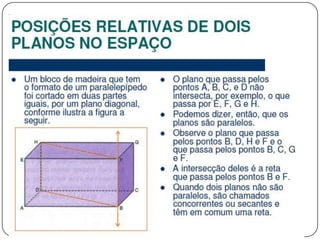
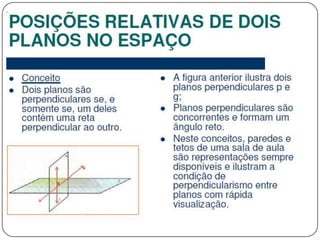
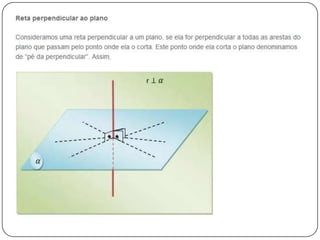

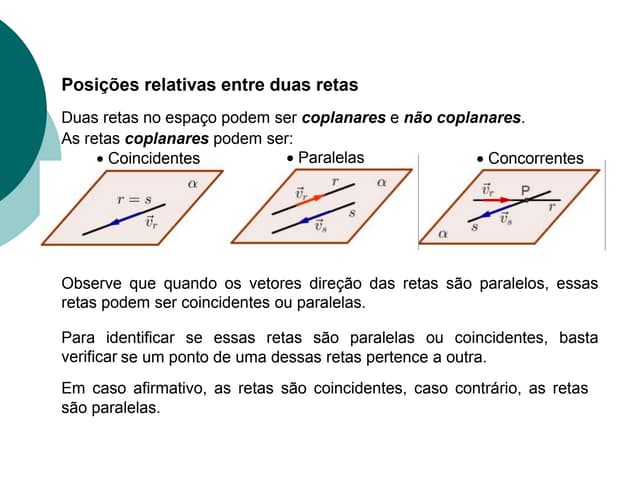
1) O documento descreve conceitos primitivos da geometria como ponto, reta e plano e suas propriedades. 2) Apresenta postulados da geometria de posição sobre a existência, determinação e separação de pontos, retas e planos no espaço. 3) Discorre sobre posições relativas entre retas e entre reta e plano, podendo ser coincidentes, paralelas, concorrentes ou reversas.