Baixado 367 vezes
![Qual o subespaço gerado pelo vetor
(1, 0, 0) , ou seja, [ (1, 0, 0) ] ?](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-1-320.jpg)
![Qual o subespaço gerado pelo vetor
(1, 0, 0) , ou seja, [ (1, 0, 0) ] ?](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/75/Aula-espaco-vetorial-1-2048.jpg)
![(1, 0) = e1 Vetor canônico, gerador da
reta horizontal
(0,1) = e2 Vetor canônico, gerador da
reta vertical
( 5,0) = 5 ⋅ (1,0)
∈ [ e1 ] ∈ [ e1 , e2 ]
(−1,0) = −1 ⋅ (1,0)
( 0, −3) = −3 ⋅ (0,1)
(0, 2) = 2 ⋅ (0, 2)
∈ [ e2 ]
(2,3) = 2 ⋅ (1, 0) + 3 ⋅ (0,1)
123 123
∈[ e1 ] ∈[ e2 ]](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-3-320.jpg)
![( a, b)
R = [ e1 , e2 ]
e2 = ( 0 ,1) 2
e1 = (1, 0 )
pois ∀ (a, b)∈ R 2
(a, b) = a (1,0) + b (0,1)
R = [ e1 , e2 , (2,0)] pois ∀ (a, b)∈ R
2 2
(a, b) = a (1,0) + b (0,1) + 0.(2,0)](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-4-320.jpg)
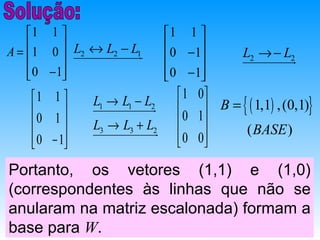
![Os elementos chamados geradores ou
sistemas de geradores de V podem
ser um conjunto L.I ou L.D.
R = [ e1 , e2 ]
2 { e1 , e2 } Conj. L.I
R = [ e1 , e2 , (2,0)] { e1 , e2 , (2,0)} Conj. L.D
2](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-6-320.jpg)
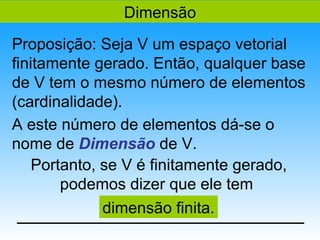
![( x, y , z ) ∈ V ⇔
x− y−z =0
Ou seja, x= y+z
Assim, um genérico vetor de U é da forma:
( y + z, y, z )
y (1,1, 0) + z (1, 0,1)
Assim:
U = [ (1,1, 0) , (1, 0,1) ]](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-18-320.jpg)
![U=[(1,1,0),(1,0,1)].
(1,1, 0) não é múltiplo de (1, 0,1)
O conjunto { (1,1, 0), (1, 0,1)} é L.I
Logo constitui uma base para o
subespaço U
Assim dim(U ) = 2](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-19-320.jpg)
![( x, y , z ) ∈ V ⇔
x − 2y = 0
Ou seja, x = 2 y e z é qualquer.
Assim, um genérico vetor de V é da forma:
(2 y, y, z ) = y (2,1, 0) + z (0, 0,1)
V = [ (2,1, 0) , (0, 0,1)]](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-20-320.jpg)
![V = [ (2,1, 0) , (0, 0,1) ]
(2,1, 0) não é múltiplo de (0, 0,1)
O conjunto { (2,1, 0), (0, 0,1)} é L.I
Logo constitui uma base para o
subespaço V
Assim dim(V ) = 2](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-21-320.jpg)
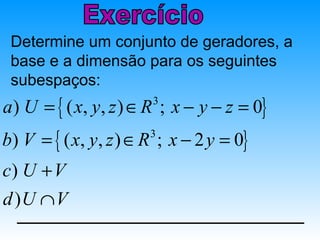
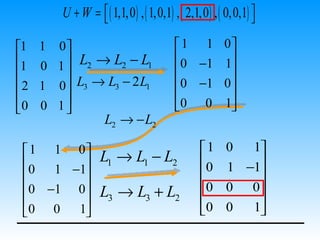
![Um conjunto de geradores para U+V è
dado pela uniao dos dois conjuntos, i.e.,:
U = [ (1,1, 0) , (1, 0,1) ]
V = [ (2,1, 0) , (0, 0,1)]
U + V = [(1,1, 0) , (1, 0,1), (2,1, 0), (0, 0,1)]
Para extrair uma base usaremos o processo
prático de determinação de uma base.](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-22-320.jpg)
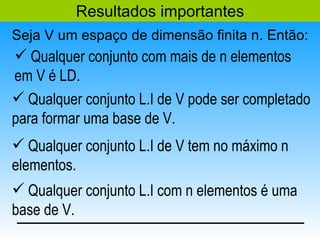
![Precisamos encontrar um conjunto de vetores que
satisfaça a ambas as condições:
x − y − z = 0
x − 2 y = 0 ⇒ x = 2 y
Substituindo na 1ª equação temos:
2y − y − z = 0 ⇒ y − z = 0 ⇒ y = z
(2 y, y, y ) = y (2,1,1)
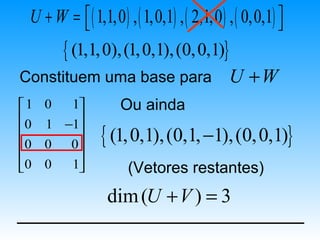
U ∩ V = [ (2,1,1) ] ⇒ dim(U ∩ V ) =1](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-25-320.jpg)
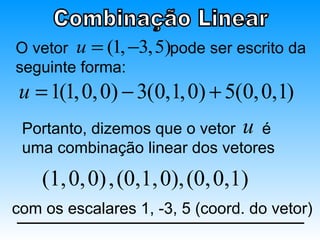
![r r r r
v = ( 1,-3,5 ) = 1i - 3j + 5k
r
i = ( 1,0,0 )
5k
r P
j = ( 0,1,0 ) r
k v
r j -3j
k = ( 0,0,1 ) i o
r r r
{
β = i , j, k } 1i
[ v] β = (1, −3,5)](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-30-320.jpg)
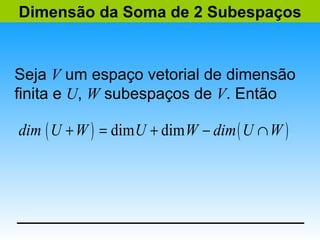
![b + c = 4
⇒ 2b = 12 ⇒ b = 6
b − c = 8
⇓
c = −2 ⇐ 6+c = 4
As coordenadas de v são -3,6 e -2
−3
A matriz das coordenadas 6
de v na base B´ é [ v] B ' =
−2
](https://image.slidesharecdn.com/aulaespaovetorial-120705222546-phpapp02/85/Aula-espaco-vetorial-35-320.jpg)

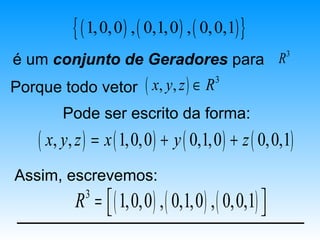
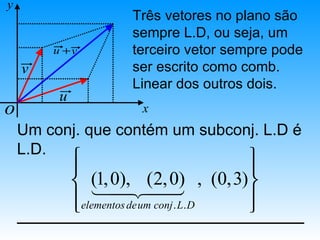
O documento descreve que o vetor (1, 0, 0) gera o subespaço unidimensional correspondente à reta horizontal no plano cartesiano R2. Além disso, explica que qualquer vetor em R3 pode ser escrito como uma combinação linear dos vetores da base canônica {(1,0,0), (0,1,0), (0,0,1)}.





























































![Aula de distribuição de probabilidade[1]](https://cdn.slidesharecdn.com/ss_thumbnails/auladedistribuiodeprobabilidade1-120719160104-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Aula de distribuição de probabilidade[1] cópia](https://cdn.slidesharecdn.com/ss_thumbnails/auladedistribuiodeprobabilidade1-cpia-120719160035-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Estatistica[1]](https://cdn.slidesharecdn.com/ss_thumbnails/estatistica1-120719160006-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

