Baixado 99 vezes
![61
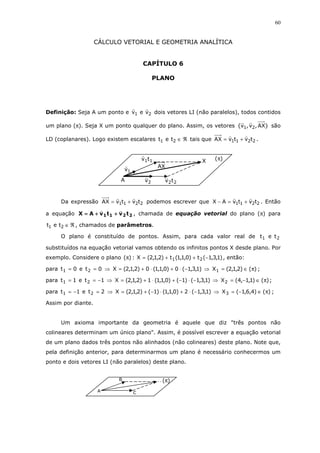
Portanto, dados três pontos não colineares A, B e C de um plano )(π podemos
escrever 21 tACtABAX:)( ⋅+⋅+=π . A escolha do ponto e da orientação dos vetores
não altera a determinação do plano, ou seja, poderíamos ter escolhido o ponto C e os
vetores BC e CA para determinarmos o mesmo plano )(π da seguinte forma
21 tCAtBCCX:)( ⋅+⋅+=π .
6.1 Equações do Plano
Equações Paramétricas
Seja )z,y,x(X um ponto qualquer do plano (π). Sejam também e conhecidos o
ponto )z,y,x(A 000 e os vetores )z,y,x(v 1111 = e )z,y,x(v 2222 = vetores LI deste
plano. Da equação vetorial 2211 tvtvAX ++= , ℜ∈∀ 21 t,t , substituindo as
coordenadas de cada elemento teremos:
22221111ooo t)z,y,x(t)z,y,x()z,y,x()z,y,x( ⋅+⋅+= ⇒
++=
++=
++=
2211o
2211o
2211o
tztzzz
tytyyy
txtxxx
, chamadas
de equações paramétricas do plano, onde os parâmetros são os escalares
ℜ∈21 tet .
Equação Geral
Como os vetores }AX,v,v{ 21 são coplanares, então, pela condição de
coplanaridade temos: 0
zyx
zyx
zzyyxx
]v,v,AX[
222
111
ooo
21 =
−−−
= . O desenvolvimento
deste determinante resultará numa expressão da forma 0dczbyax ====++++++++++++ chamada
de equação geral do plano.
Equação Segmentária
Da equação geral do plano (π) podemos escrever: dczbyax −=++ . Se 0d ≠ ,
vem:
d
d
d
c
y
d
b
x
d
a
−
−
=
−
+
−
+
−
. Se 0ce0b,0a ≠≠≠ ⇒ 1
c
d
z
b
d
y
a
d
x
=
−
+
−
+
−
. Fazendo
c
d
re
b
d
q,
a
d
p −=−=−= , temos a equação segmentária do plano: 1
r
z
q
y
p
x
====++++++++ .
Os pontos )0,0,p(P , )0,q,0(Q e )r,0,0(R são as interseções do plano (π) com os
eixos coordenados Ox, Oy e Oz, respectivamente. O plano (π) ao "passar" pelo ℜ3](https://image.slidesharecdn.com/gacap06-130507191027-phpapp01/85/GEOMETRIA-ANALITICA-cap-06-2-320.jpg)

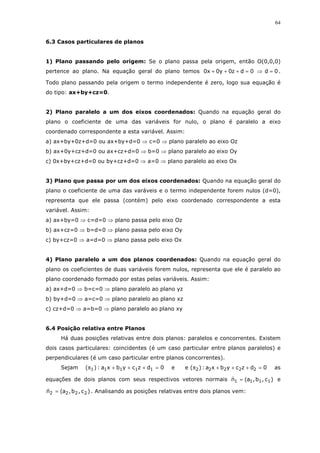
![63
Solução:
a) Tomando o ponto ( )1,2,0B e os vetores ( )0,,2BA 2
3−−= e ( )1,1,0CB −= , a equação
vetorial é: 21 tCBtBABX:)( ⋅+⋅+=π ⇒ ( ) 212
3 t)1,1,0(t0,,2)1,2,0(X −+−−+= .
b) Equações Paramétricas:
−=
+−=
−=
π
2
212
3
1
t1z
tt2y
t2x
:)( , ℜ∈∀ 21 t,t .
c) Fazendo ( )z,y,xX e tomando ponto ( )1,2,0B , temos que os vetores BX , BA e CB
são coplanares, Logo: 0
110
02
1z2y0x
]CB,BA,BX[
2
3 =
−
−−
−−−
= ⇒ 012z4y4x3 =+−−
que é a equação geral do plano.
d) Da equação geral temos: 012z4y4x3 =+−− ⇒ 12z4y4x3 −=−− ⇒
12
12
z
12
4
y
12
4
x
12
3
−
−
=
−
−
−
−
−
⇒ 1
3
z
3
y
4
x
=++
−
que a equação segmentária.
e) Da equação geral 12z4y4x3 −=−− vem que )4,4,3(n −−= é o vetor normal ao
plano.
f) Da equação segmentária 1
3
z
3
y
4
x
=++
−
temos que:
=
=
−=
3r
3q
4p
. Então:
( )0,0,4)0,0,p(P −= , )0,3,0()0,q,0(Q = e ( )3,0,0)r,0,0(R = . Portanto, os traços sobre os
planos coordenados são as reta:
tPQPX:)r( PQ ⋅+= ⇒ ( ) ( ) t0,3,40,0,4X ⋅+−=
tPRPX:)r( PR ⋅+= ⇒ ( ) ( ) t3,0,40,0,4X ⋅+−=
tQRQX:)r( QR ⋅+= ⇒ ( ) ( ) t3,3,00,3,0X ⋅−+=
z
y
x
-4
3
3
(π)](https://image.slidesharecdn.com/gacap06-130507191027-phpapp01/85/GEOMETRIA-ANALITICA-cap-06-4-320.jpg)







O documento descreve vários conceitos relacionados a planos em geometria analítica, incluindo: 1) Definições de plano, equação vetorial e casos particulares de planos; 2) Métodos para representar planos através de equações paramétricas, geral e segmentária; 3) Cálculo do vetor normal a um plano e relações entre os vetores normais de planos.










































































