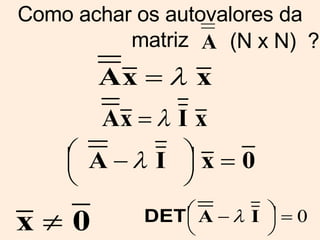
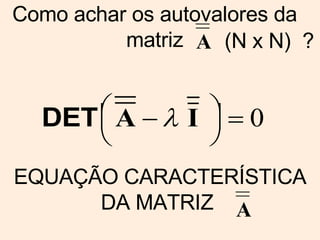
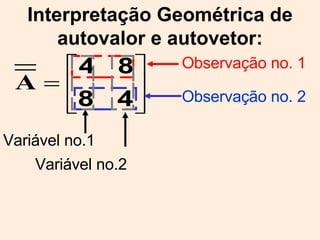
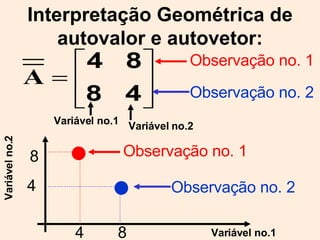
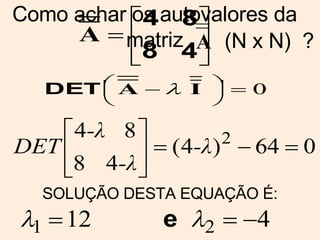
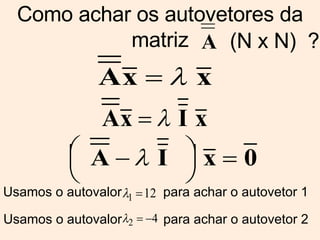
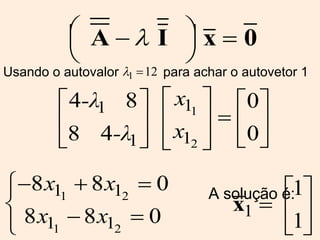
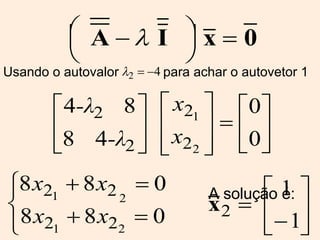
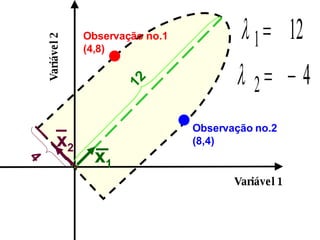
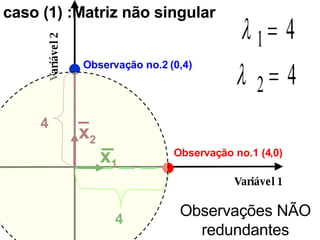
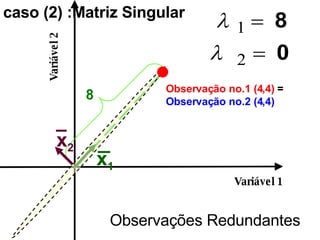
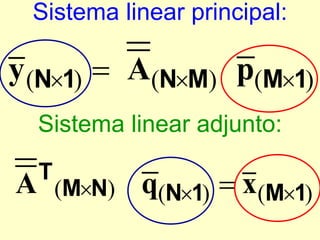
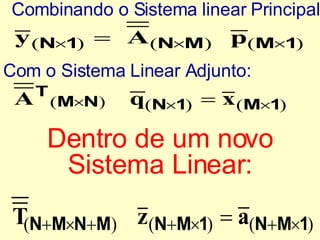
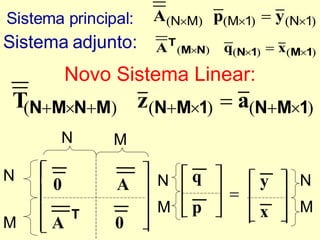
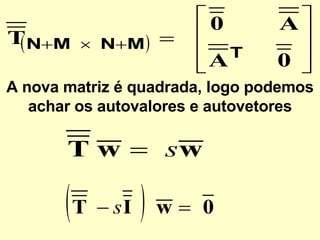
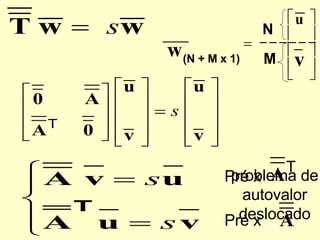
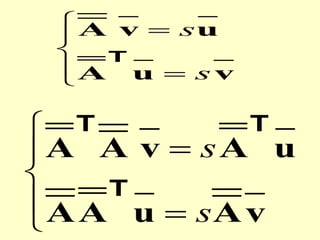
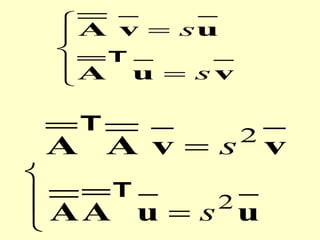
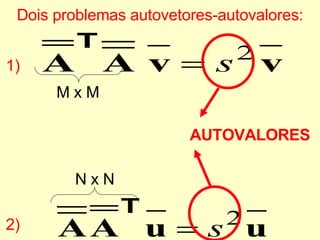
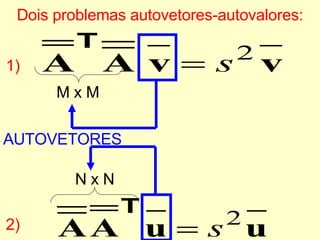
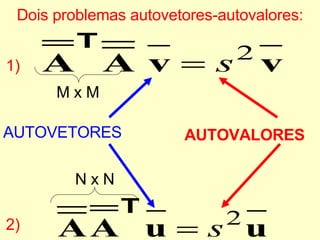
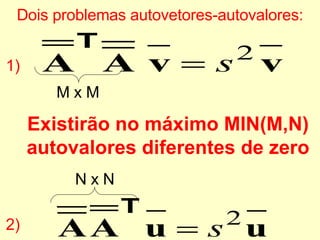
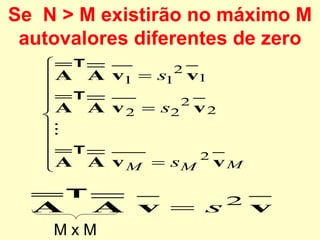
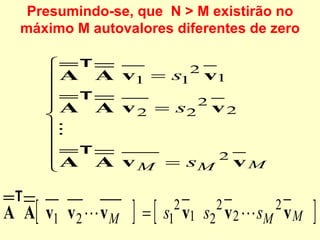
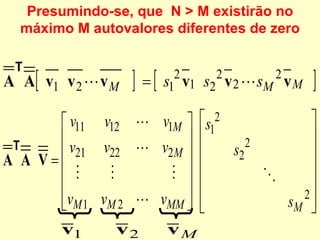
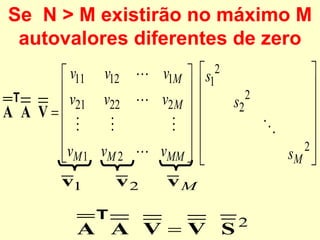
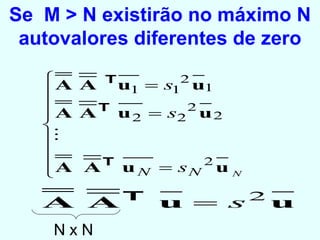
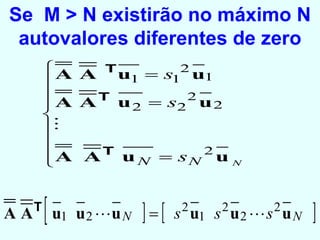
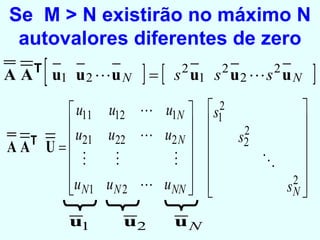
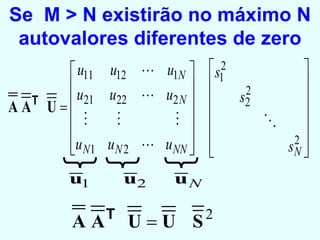
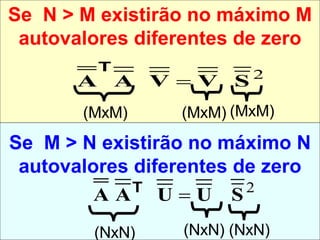
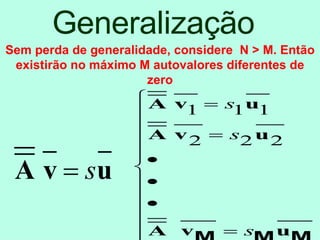
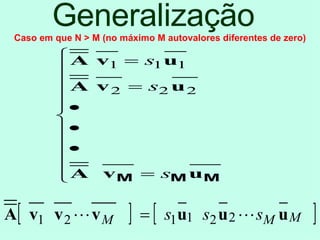
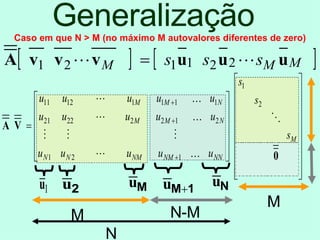
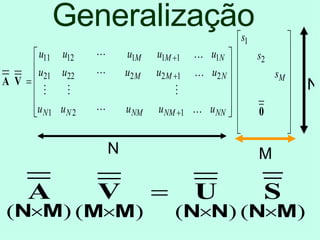
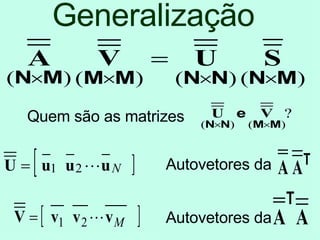
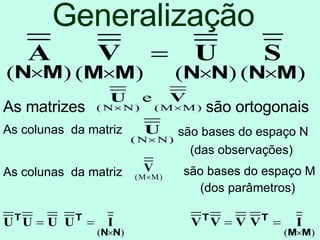
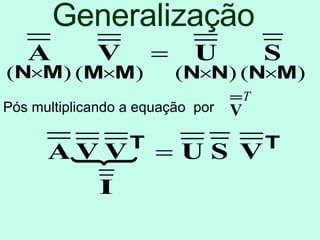
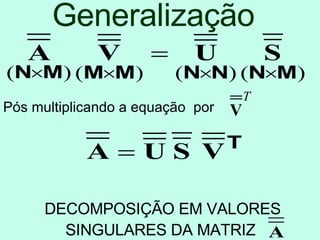
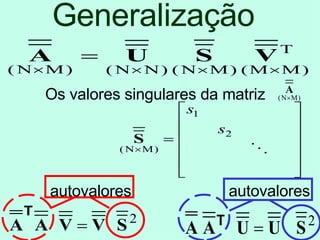
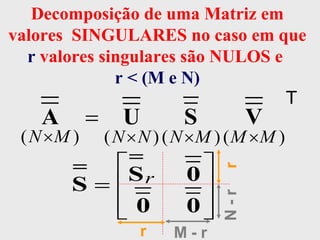
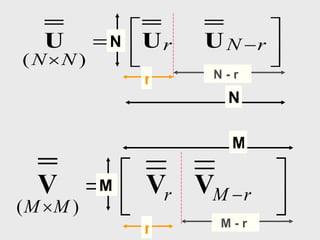
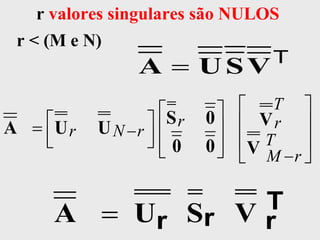
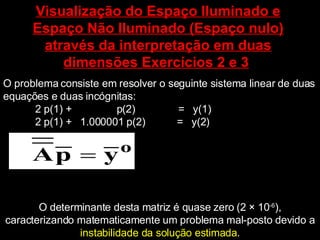
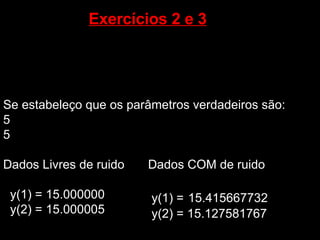
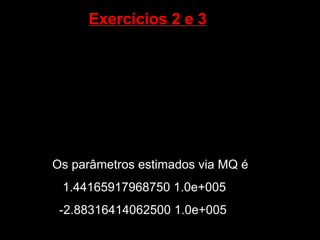
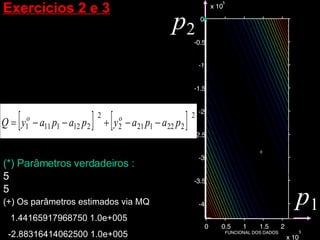
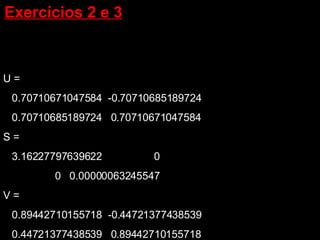
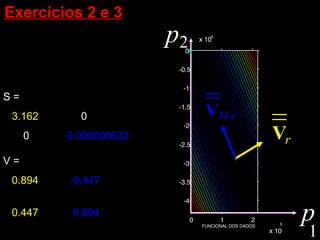
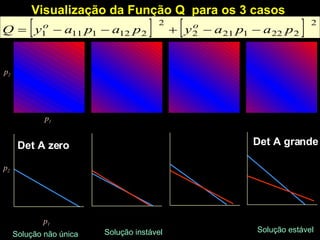
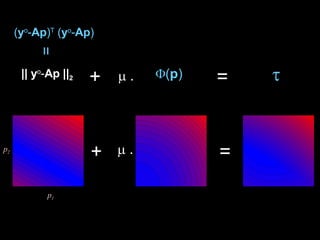
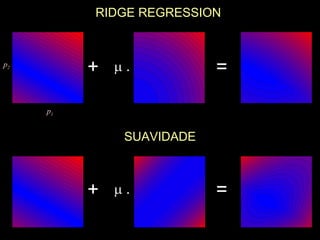
O documento discute propriedades de autovalores e autovetores de sistemas lineares representados por matrizes. Explica que autovalores e autovetores permitem decompor uma matriz em espaços ortogonais e analisar propriedades como unicidade e estabilidade da solução do sistema linear. A decomposição em valores singulares é apresentada como forma de detectar problemas mal-postos no sistema.