Baixado 63 vezes


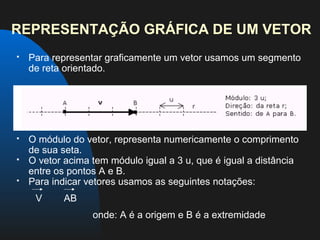
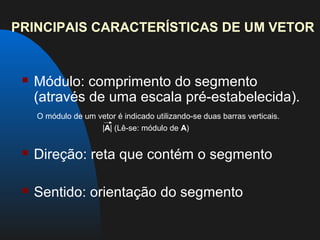
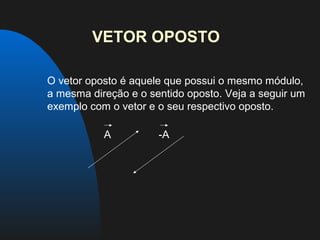
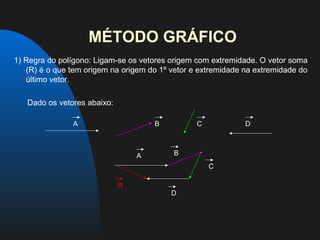
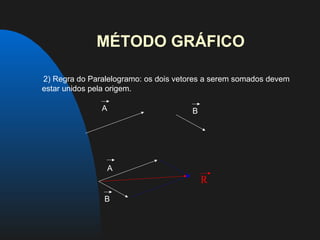
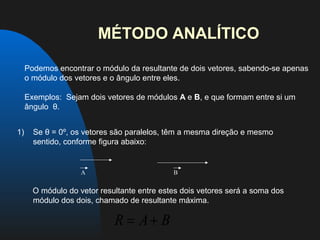
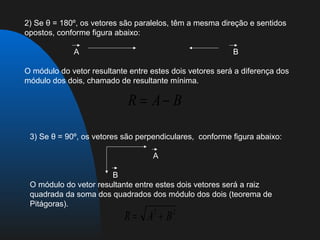
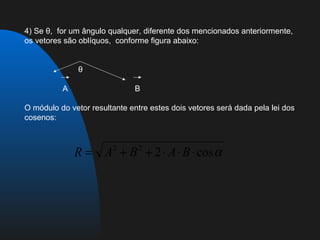
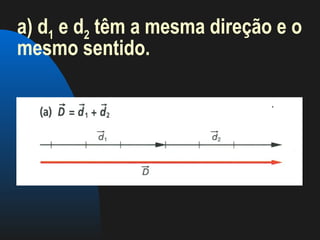
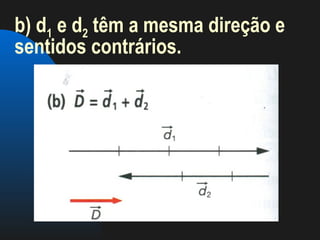
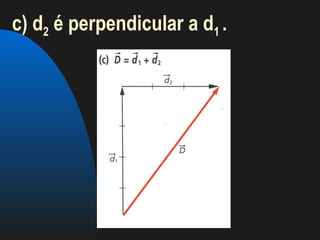
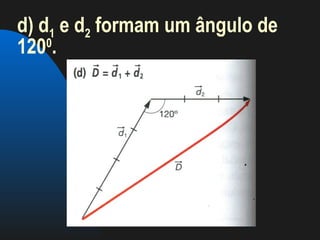

Este documento apresenta conceitos fundamentais sobre forças e vetores. Explica que força é toda ação capaz de produzir ou modificar um movimento. Apresenta grandezas físicas escalares e vetoriais, e detalha as características de vetores como módulo, direção e sentido. Demonstra métodos gráficos e analíticos para representar e somar vetores. Por fim, fornece exercícios sobre o tema.





















































































