Baixado 249 vezes



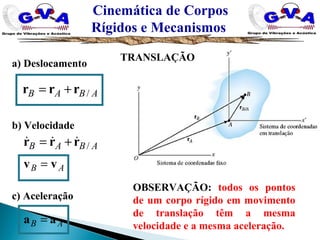
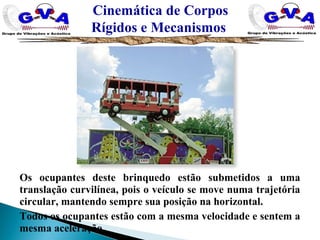
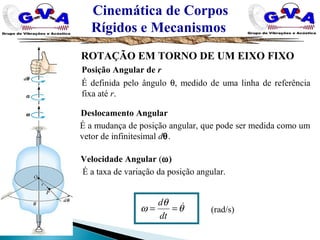
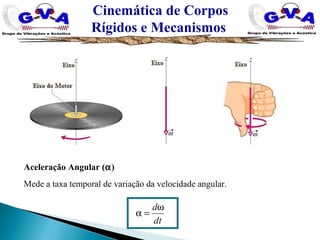
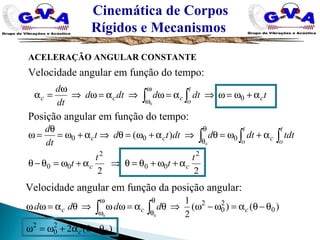
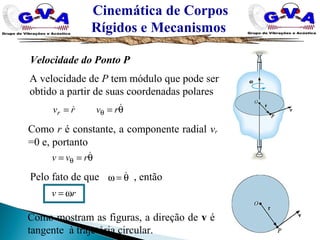
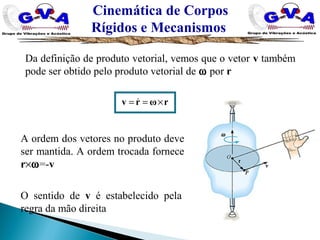
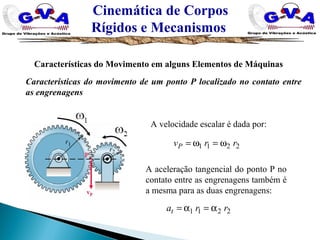
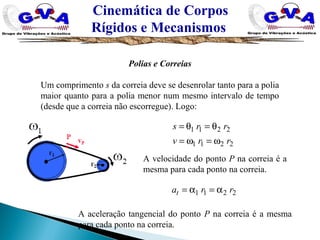
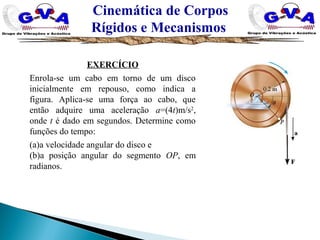
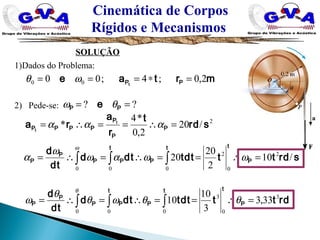

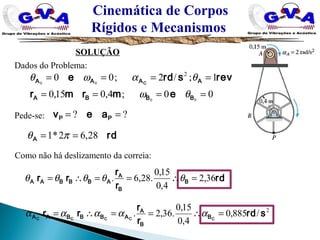
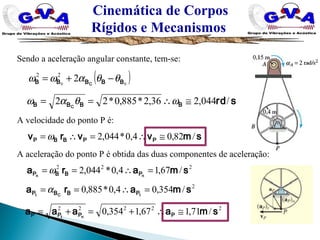
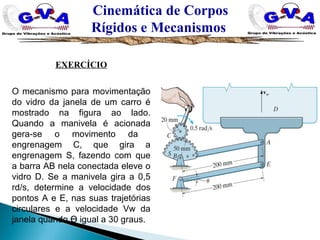


O documento trata da cinemática de corpos rígidos e mecanismos, abordando a translação, rotação e movimento relativo. Destaca conceitos como velocidade angular, aceleração angular e suas relações, além de exemplos de aplicação em máquinas e mecanismos. O conteúdo é parte de um curso de engenharia mecânica, com ênfase em movimentos planos e suas equações.



































































