Baixado 804 vezes

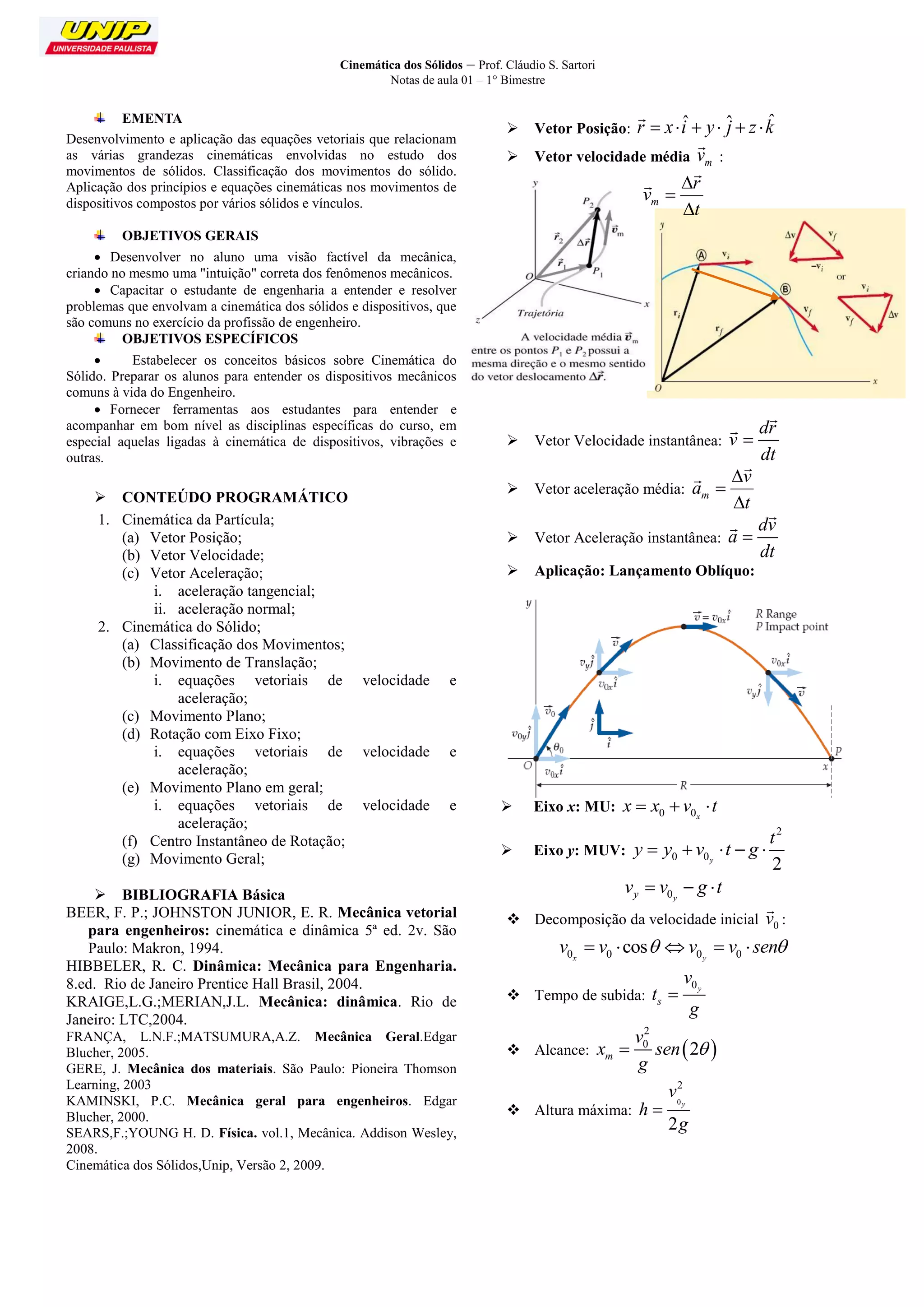


























1. O documento apresenta as notas de aula sobre cinemática dos sólidos, abordando conceitos como vetor posição, velocidade e aceleração para partículas e sólidos. 2. São apresentados os objetivos gerais e específicos da disciplina, conteúdo programático, bibliografia e exemplos resolvidos sobre rotação com eixo fixo. 3. O resumo explica que durante rotação com eixo fixo, todos os pontos do sólido apresentam trajetórias circulares com a mesma vel





















































