Baixado 52 vezes
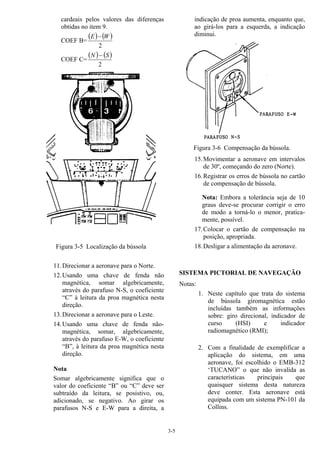


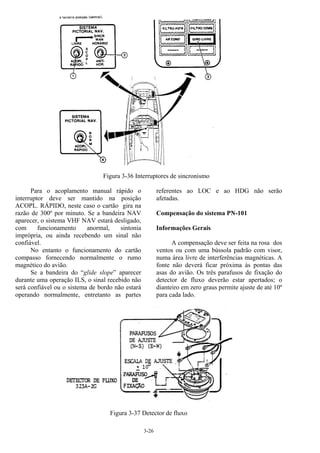


1) O documento discute instrumentos de navegação, especificamente a bússola magnética, explicando seu mecanismo e como é afetada pelos campos magnéticos da Terra e do avião. 2) É descrito o processo de compensação da bússola para corrigir desvios causados por influências magnéticas locais através da aplicação de ímãs compensadores. 3) A compensação deve ser feita sempre que a bússola for removida e reinstalada em um avião para garantir sua precisão.











































































































