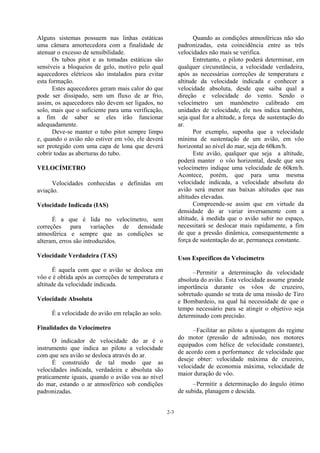
Baixado 60 vezes
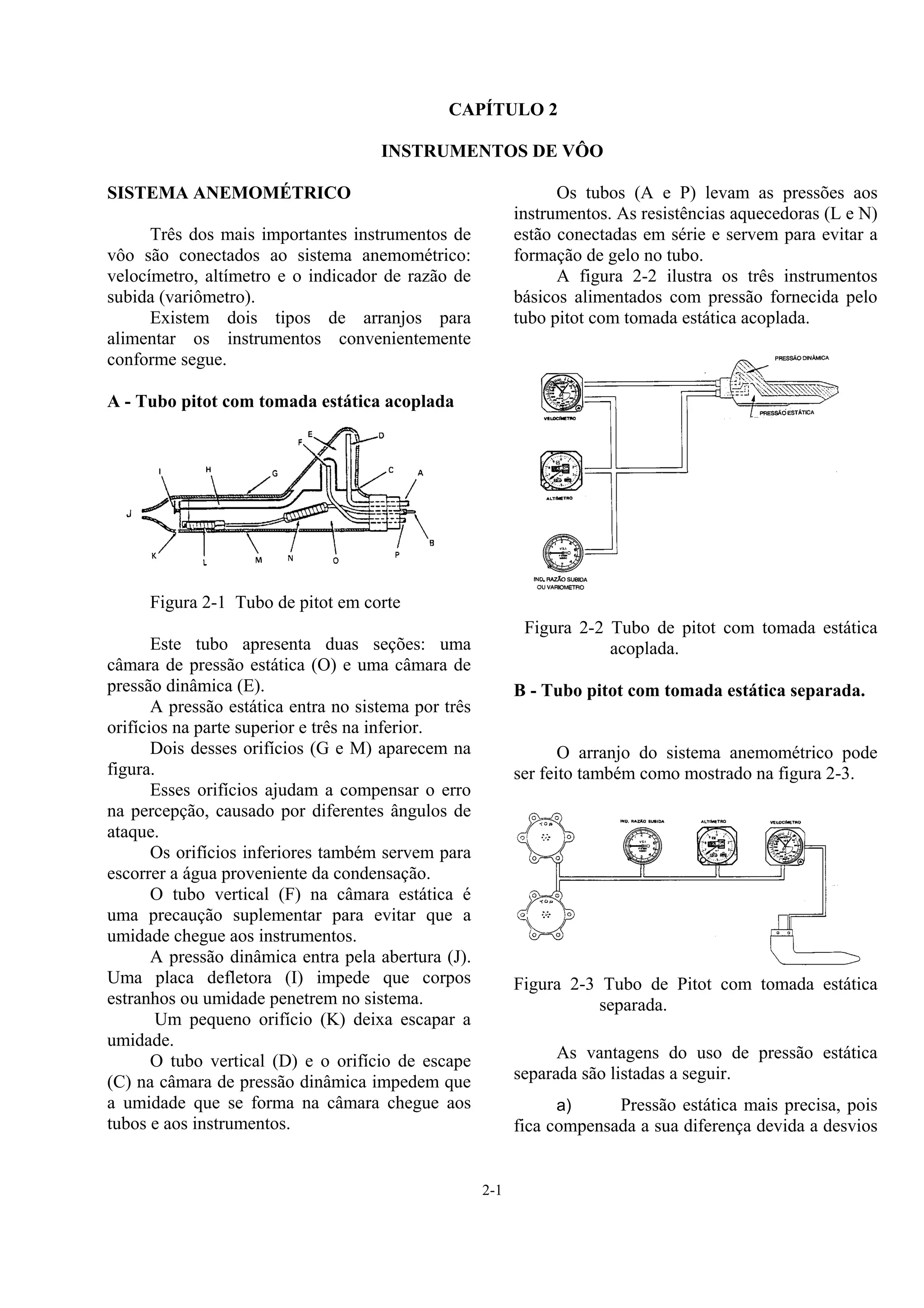

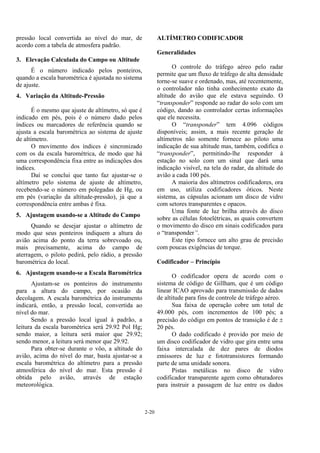









O documento descreve o sistema anemométrico de um avião, que mede a velocidade, altitude e taxa de subida através de instrumentos conectados a tubos Pitot. Dois arranjos são possíveis: um tubo Pitot com tomada estática acoplada ou separada. Os três principais instrumentos (velocímetro, altímetro e variômetro) medem a pressão estática e/ou dinâmica fornecida pelo sistema. O velocímetro funciona por diferença de pressão, comparando a pressão estática da atmosfer