Transferir como PDF, PPTX
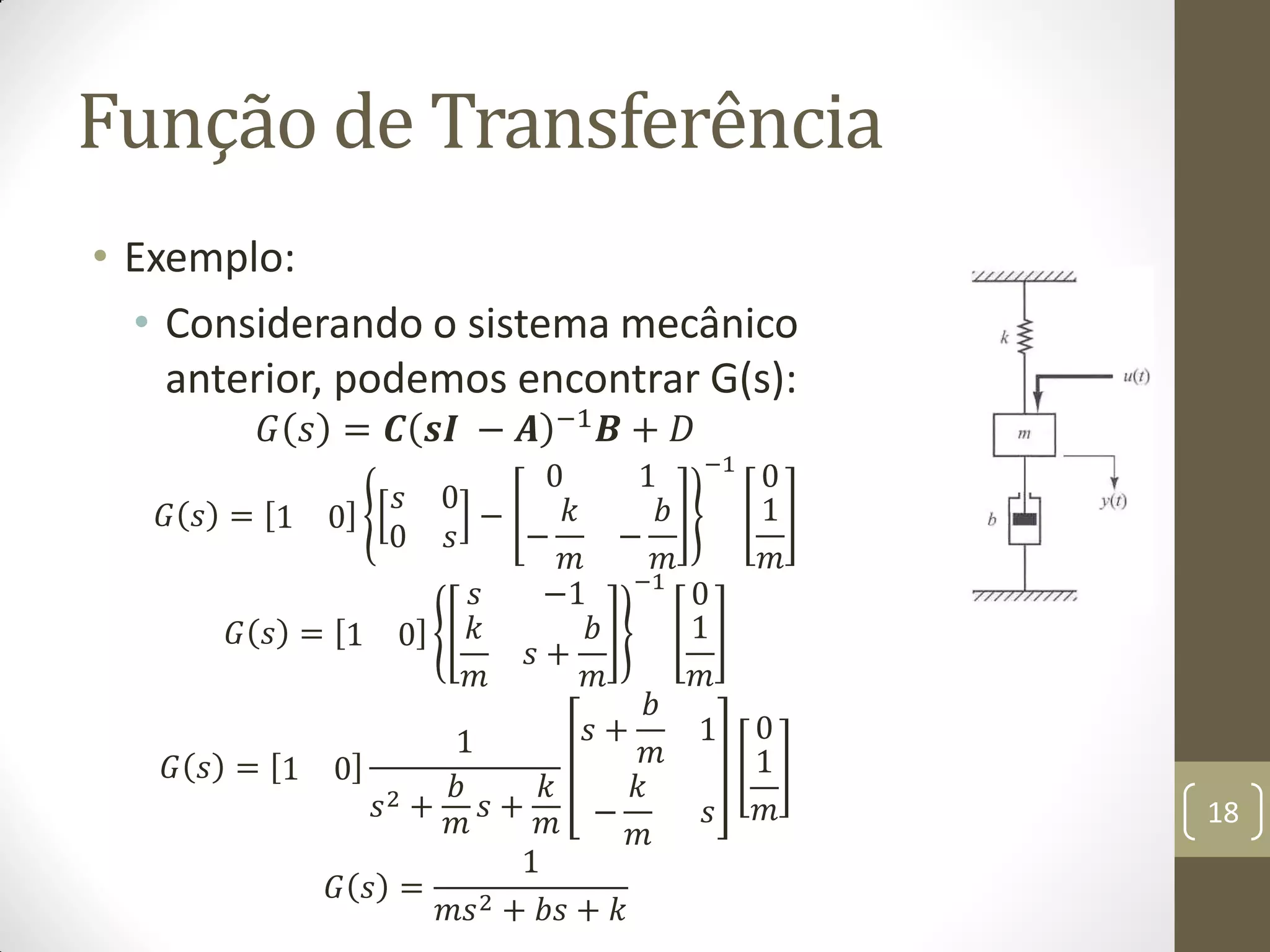
![Função de Transferência
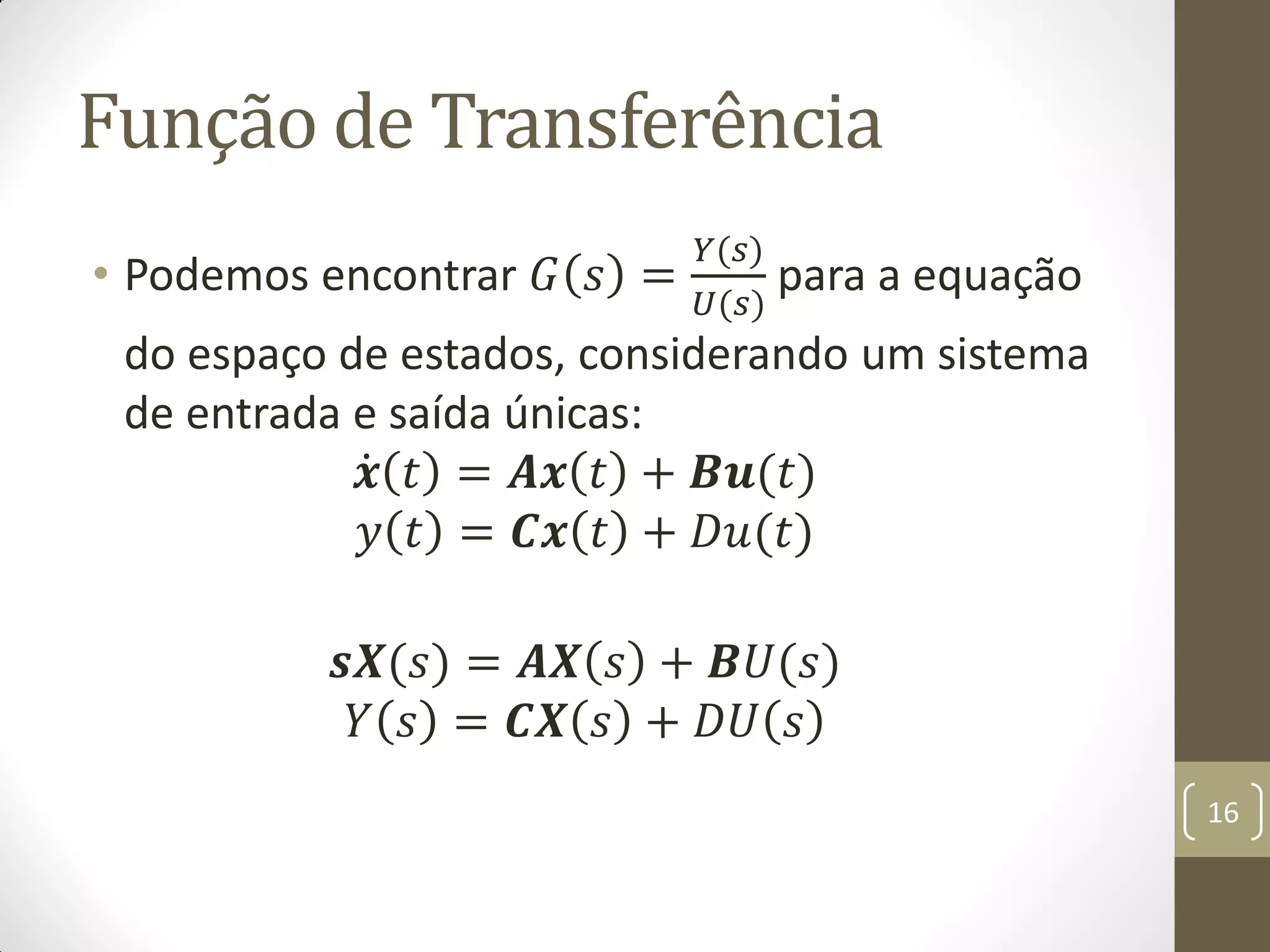
• Isolando 𝑿(𝑠):
𝒔𝑿 𝑠 − 𝑨𝑿 𝑠 = 𝑩𝑈(𝑠)
𝒔𝑰 − 𝑨 𝑿 𝑠 = 𝑩𝑈 𝑠
𝑿(𝑠) = 𝒔𝑰 − 𝑨 −1 𝑩𝑈(𝑠)
• Substituindo em 𝒀 𝑠 :
𝑌 𝑠 = 𝑪 𝒔𝑰 − 𝑨 −1 𝑩𝑈(𝑠) + 𝐷𝑈 𝑠
𝑌 𝑠 = [𝑪 𝒔𝑰 − 𝑨 −1 𝑩 + 𝐷]𝑈(𝑠)
𝐺 𝑠 =
𝑌(𝑠)
𝑈(𝑠)
= 𝑪 𝒔𝑰 − 𝑨 −1
𝑩 + 𝐷
17](https://image.slidesharecdn.com/espacoestados-130622142220-phpapp02/75/Estudos-de-Controle-Aula-5-Espaco-de-Estados-17-2048.jpg)

O documento discute os conceitos fundamentais da teoria de controle moderno no espaço de estados, incluindo: 1) o conceito de estado e variáveis de estado que determinam completamente o comportamento de um sistema, 2) a representação do sistema através de equações no espaço de estados e 3) a obtenção da função de transferência a partir da representação no espaço de estados.










































































