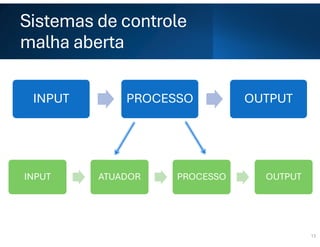
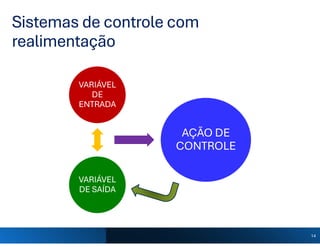
O documento aborda a engenharia de controle, enfatizando a importância da realimentação na automação de processos em diversas áreas. Apresenta um histórico do desenvolvimento dos sistemas de controle, destacando contribuições de importantes figuras e a evolução de técnicas como controle robusto e adaptativo. Além disso, diferencia os sistemas de controle em malha aberta e fechada, abordando suas características, vantagens e desvantagens.


![Função de Transferência
32
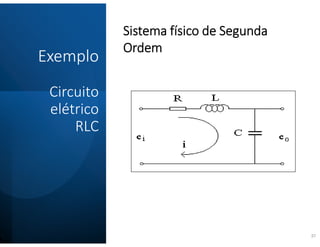
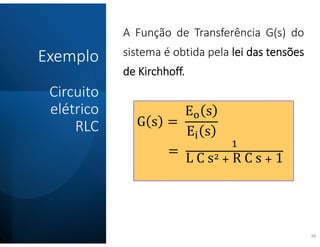
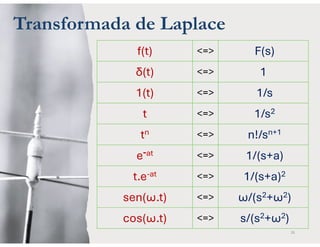
Função de transferência
G(s) =
L[saída ]
L[entrada] Condições
iniciais nulas
32
G(s) =
Y(s)
X(s)
=
b s + b sm−1 + ... + bm−1s + b
a s + a sn−1 + ... + an−1s + a
, n ≥ m
Equação Característica: denominador da equação G(s)
Portanto,](https://image.slidesharecdn.com/aula01controle20241introducao-240516193410-68db56f4/85/aula01Controle_2024_1_nintroduca-seo-pdf-32-320.jpg)