Baixado 756 vezes









![CURVA DE CONJUGADO x ROTAÇÃO PARA MOTORESCURVA DE CONJUGADO x ROTAÇÃO PARA MOTORES
AUTOVENTILADOS, ACIONADOS COM INVERSOR DEAUTOVENTILADOS, ACIONADOS COM INVERSOR DE
FREQÜÊNCIA.FREQÜÊNCIA.
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
1.05
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6
[f/fn] - Freqüência (p.u.)
[TR]-Reduçãonotorque(p.u.)
A
B
C](https://image.slidesharecdn.com/apresentaodrivesgeralresumida-140328193857-phpapp02/85/inversor-de-frequencia-25-320.jpg)
![CURVA DE CONJUGADO x ROTAÇÃO PARA MOTORES COMCURVA DE CONJUGADO x ROTAÇÃO PARA MOTORES COM
VENTILAÇÃO INDEPENDENTE, ACIONADOS COM INVERSORVENTILAÇÃO INDEPENDENTE, ACIONADOS COM INVERSOR
DE FREQÜÊNCIA.DE FREQÜÊNCIA.
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
1.05
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6
[f/fn] - Freqüência
[TR]-Reduçãonotorque(p.u.)](https://image.slidesharecdn.com/apresentaodrivesgeralresumida-140328193857-phpapp02/85/inversor-de-frequencia-26-320.jpg)


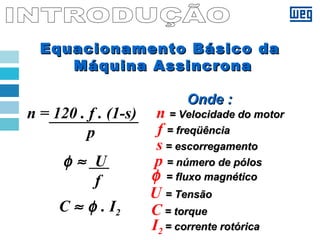
O documento descreve o que é um inversor de frequência e como ele funciona para variar a velocidade de motores de indução trifásicos. Ele discute os métodos tradicionais e eletrônicos para controle de velocidade e fornece detalhes sobre como os inversores de frequência controlam a velocidade usando controle escalar ou vetorial. O documento também fornece especificações e aplicações dos inversores da linha WEG.



































































![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)



















