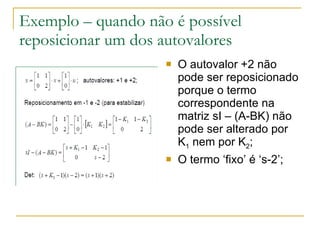
O documento discute realimentação de estados em sistemas de controle. Apresenta como reposicionar os pólos da malha fechada alterando o ganho K e como isso pode afetar a observabilidade do sistema, criando ou destruindo esta propriedade. Também fornece a fórmula de Ackermann para calcular K e exemplos no MatLab ilustrando os conceitos.





![Exemplo – no MatLaB >> f=place(A,B,[-2+3.464j,-2-3.464j]) f = 13.9993 1.0000 >> f=acker(A,B,[-2+3.464j,-2-3.464j]) f = 13.9993 1.0000](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-10-320.jpg)
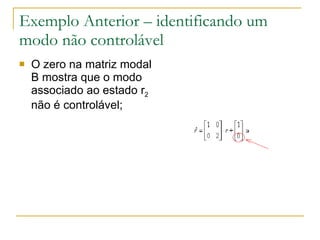
![Exemplo Anterior – identificando um modo não controlável >> [P,AV]=eig(A) P = 1.0000 0.7071 0 0.7071 AV = 1 0 0 2 >> Pinv = inv(P) Pinv = 1.0000 -1.0000 0 1.4142 >> Bstar = Pinv*B Bstar = 1 0](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-12-320.jpg)
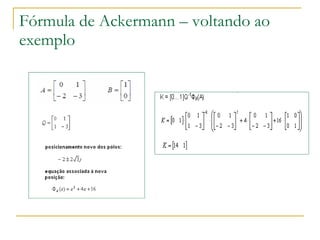
![Fórmula de Ackermann Para sistemas com ordem maior que 2, a fórmula de Ackermann provê uma maneira mais simples de determinar os valores de K; Q = [A AB …A n-1 B] matriz de controlabilidade; K = [0…1]Q -1 d (A) d (s): polinômio definido pela localização dos novos pólos;](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-14-320.jpg)
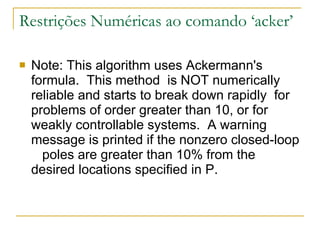
![Ackermann – Função p/ evoluir polinômio c/ argumento matriz quadrada >> P=[1 4 16]; >> A=[0 1;-2 -3]; >> Y=POLYVALM(P,A) Y = 14 1 -2 11 1,4,16 coeficientes de s 2 +4s+16; 3 coeficientes porque grau máximo (no caso) é 2; Atenção: POLYVAL ≠ POLYVAL M;](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-16-320.jpg)


![Exemplo – efeito sobre observabilidade Autovalores de A: 2.61 e 0.38 (instável); Projeto de realimentação para posicionar os autovalores em -1 e -2; O posicionamento em -1 deverá comprometer a observabilidade; >> f=place(A,B,[-1,-2]) f = 6.0000 1.0000; Ã=(A-BK) Ã = [-3 -2;1 0];](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-20-320.jpg)
![Exemplo – efeito sobre observabilidade Autovalores de A: 2.61 e 0.38 (instável); Projeto de realimentação para posicionar os autovalores em -1 e -2; O posicionamento em -1 deverá comprometer a observabilidade; >> Atil= [-3 -2;1 0]; >> C=[1 1]; >> O=OBSV(Atil,C) O = 1 1 -2 -2 >> rank(O) ans = 1](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-21-320.jpg)
![Exercício A = (1 1;1 2) B = (1;0) Verificar estabilidade (instabilidade, no caso) Projetar ganho de realimentação de estados que estabiliza o sistema; Se novos autovalores em -5 e -6, K = [14 57]; Verificar se a Observabilidade foi afetada;](https://image.slidesharecdn.com/aula1-controleavanado2011-i-110214044318-phpapp02/85/Aula1-controle-avancado-2011-i-22-320.jpg)



































































