Transferir como PDF, PPTX
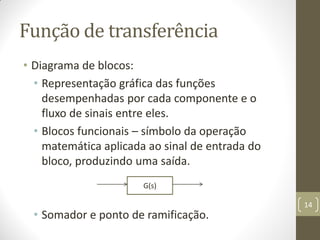
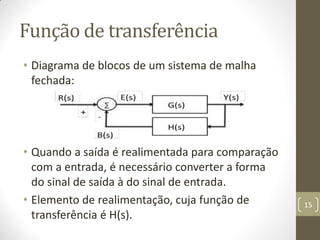
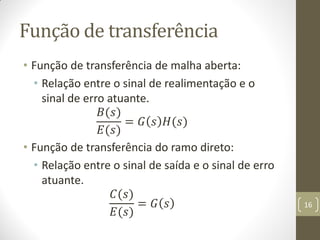
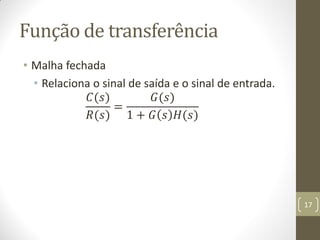


O documento discute modelos matemáticos para sistemas dinâmicos, incluindo sistemas lineares e não lineares. Ele também explica funções de transferência, que caracterizam as relações de entrada e saída de sistemas lineares invariantes no tempo, e como elas podem ser usadas para análise e projeto desses sistemas. Diagramas de blocos são apresentados como uma forma de representar funções de transferência.

































































