Baixado 42 vezes
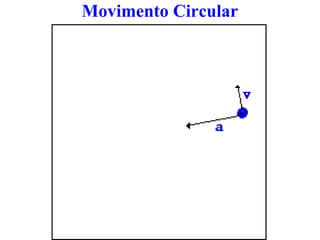
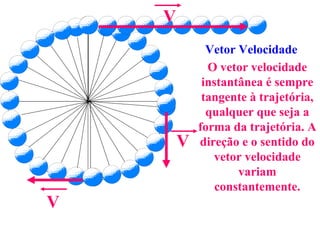
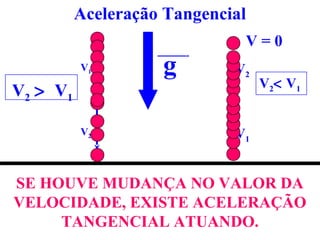
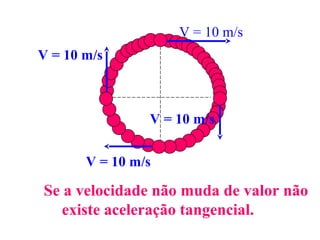
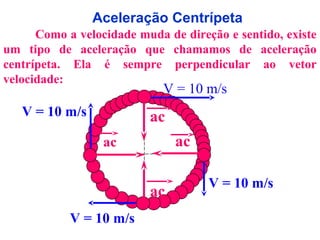
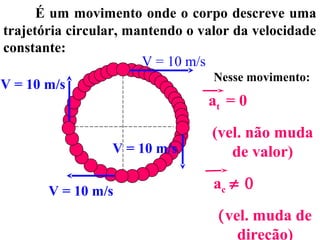

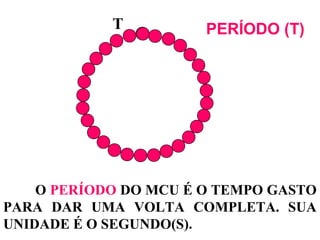
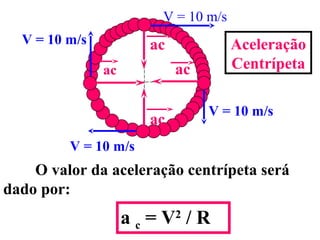

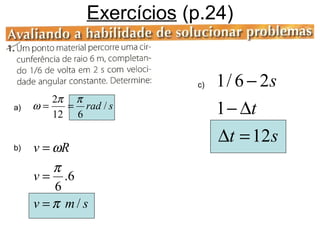
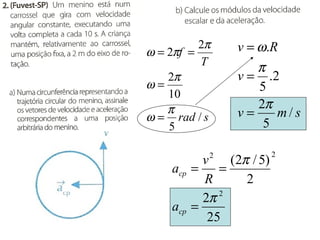
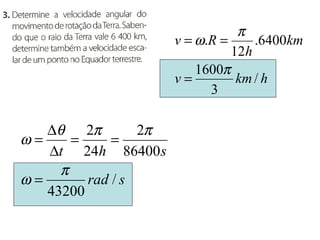


1) O documento discute conceitos de movimento circular como velocidade angular, velocidade linear, aceleração centrípeta e tangencial. 2) Rodes acoplados a um mesmo eixo têm mesma velocidade angular e frequência, enquanto suas velocidades lineares são proporcionais aos seus raios. 3) Para rodas acopladas por correia, as velocidades lineares em contato com a correia são iguais, e as velocidades angulares são inversamente proporcionais aos raios.










































































