Baixado 18 vezes
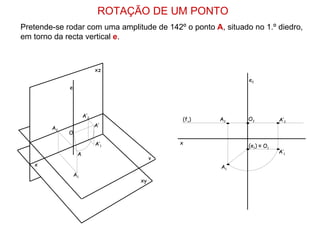
![ROTAÇÃO DE UM SEGMENTO DE RECTA
Pretende-se rodar o segmento de recta [AB], com uma amplitude de 45º no
sentido dos ponteiros do relógio, em torno da recta de topo e.
xz A’2
φ1
φ
A’
B’2
Q A2 (e2) ≡ O2 ≡ Q2
B’
O
B B2
A
e
O1
x B’1 Q1
x (hφ1) B1
xy
(hφ) A1 A’1
e1](https://image.slidesharecdn.com/mga10rota-120421152156-phpapp01/85/Mga10rota-6-320.jpg)
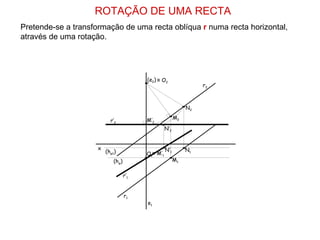
![ROTAÇÃO DE UM SEGMENTO DE RECTA PARA OBTER
A SUA VERDADEIRA GRANDEZA
Pretende-se rodar o segmento de recta onlíquo [AB], para obter a V.G., através
da transformação do segmento de recta [AB] num segmento de recta frontal.
e2
(fν1) A2 A’2
(fν) P2 O2 ≡ P’2
(fν2) B2 B’2
x P’1
A’1 B1 B’1
P1
A1
(e1) ≡ O1](https://image.slidesharecdn.com/mga10rota-120421152156-phpapp01/85/Mga10rota-8-320.jpg)

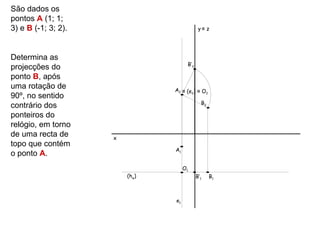
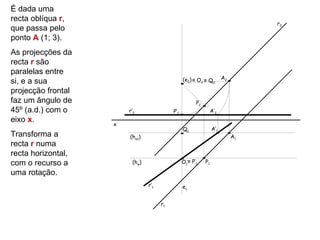
![É dado um
segmento de
recta [PQ], y≡ z
sendo P (-2; 4;
v2
4) e Q (-4; 2; 1).
É dada uma
recta vertical v
(fν) P’2 R2 P2
que contém o
ponto A (1; 1; 2).
Determina as A2
projecções do (fν1) S2 Q’2 Q2
segmento de
recta [PQ], após x
uma rotação de A1 ≡ (v1) ≡ R1 ≡ S1
70º, no sentido
dos ponteiros do Q1
relógio, em torno
da recta v.
P1
P’1
Q’1](https://image.slidesharecdn.com/mga10rota-120421152156-phpapp01/85/Mga10rota-11-320.jpg)
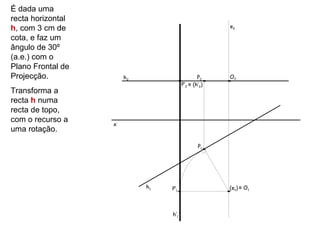
![É dado um
segmento de
recta [PQ], y≡ z
sendo P (-2; 4;
4) e Q (-4; 2; 1).
Determina a
V.G. de PQ,
P2
transformando P’2 T’2 Q’2
[PQ] num
T2
segmento de
recta
Q2
horizontal, com (e2) ≡ O2 ≡ A2 ≡ B2
o recurso a uma
rotação. x
(hφ2) B1 Q’1 Q1
V.G.
(hφ) O1≡ T’1 T1
(hφ1) P’1 A1 P1
e1](https://image.slidesharecdn.com/mga10rota-120421152156-phpapp01/85/Mga10rota-15-320.jpg)
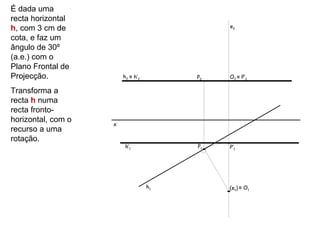
![É dado um
segmento de
recta [AB],
situado no 1.º r2 r’2 e2
diedro, com 5 cm
de comprimento,
sendo A (3; 5) o (fν) A2 O2 ≡ A’2
seu extremo
superior.
A recta suporte
B’2
de [AB] é B2
(fν1)
passante e a sua
projecção frontal P’2
faz um ângulo de x P1 ≡ P2
45º (a.e.) com o B1
eixo x.
r’1
Desenha as A1
A’1 P’1
projecções do
segmento de r1
recta [AB], com o (e1) ≡ O1
recurso a uma
rotação.](https://image.slidesharecdn.com/mga10rota-120421152156-phpapp01/85/Mga10rota-16-320.jpg)
![É dado um
segmento de
recta de perfil
[AB], sendo A (4; p1 ≡ p2
1) e B (2; 4).
Determina a V.G.
de AB,
B2
transformando p’2 B’2 A’2
[AB] num
segmento de
recta horizontal,
A2
com o recurso a
(e2) ≡ O2 ≡ Q2
uma rotação.
x
(hφ1) B’1 Q1 B1
V.G.
(hφ) O1 ≡ A’1 A1
e1
p’1](https://image.slidesharecdn.com/mga10rota-120421152156-phpapp01/85/Mga10rota-17-320.jpg)

1) O documento descreve os elementos básicos e métodos de rotação em geometria descritiva, incluindo rotação de pontos, segmentos de reta e retas. 2) São apresentados vários exemplos de como aplicar rotações para transformar objetos geométricos em posições mais favoráveis e obter verdadeiras grandezas. 3) As rotações permitem representar objetos de forma mais conveniente para resolver problemas geométricos.






















































































