Transferir como PDF, PPTX

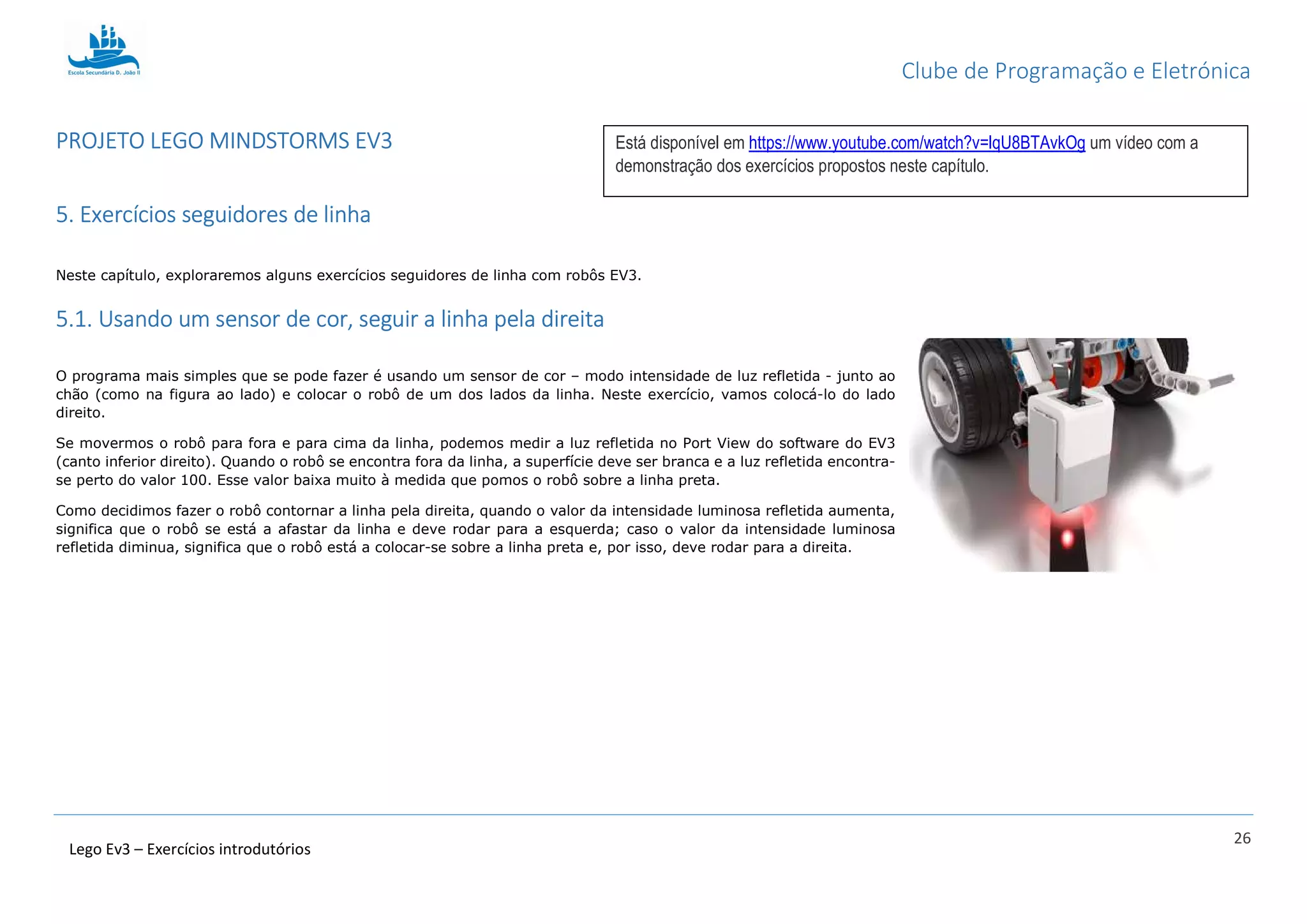
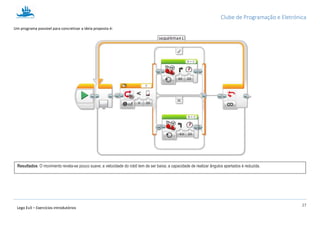
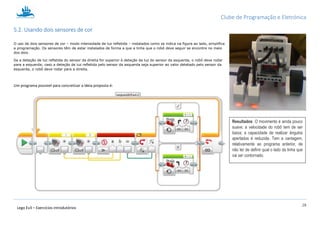

O documento discute vários exercícios para ensinar robôs LEGO Mindstorms EV3 a seguir linhas usando sensores de cor. Os exercícios variam na configuração dos sensores e na lógica do programa para melhorar a suavidade do movimento e a capacidade de encontrar a linha caso seja perdida.