Transferir como PDF, PPTX

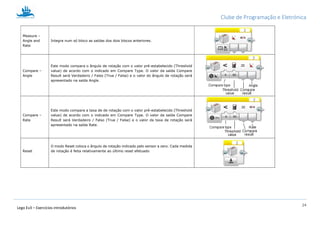


O documento descreve o sensor de rotação do Lego Mindstorms EV3, explicando que pode medir a taxa de rotação e o ângulo de rotação. Também explica como programar o sensor de rotação para fazer um robô realizar uma trajetória quadrada, usando blocos como "Mover", "Sensor de rotação" e "Esperar".


















































































