Transferir como PDF, PPTX

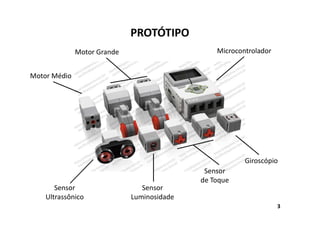

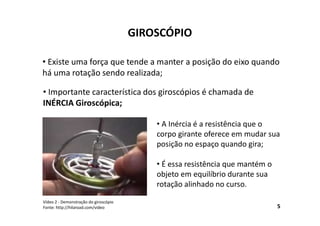

O documento descreve um projeto de um robô chamado Gyro Boy construído com o kit LEGO Mindstorms EV3. O objetivo era desenvolver uma solução educacional para ensinar sobre sensores e atuadores, implementando código em uma IDE proprietária enquanto trabalhando em equipe. O protótipo incluiu um sensor ultrassônico, motores médio e grande, sensor de luminosidade, sensor de toque e um giroscópio conectado a um microcontrolador. O documento explica como o giroscópio funciona com base na primeira lei de Newton



































































