Transferir como PDF, PPTX




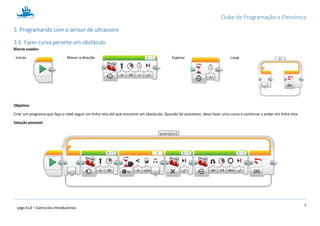

1) O documento descreve exercícios introdutórios para o sensor de ultrassons do Lego Mindstorms EV3, incluindo como medir distâncias e detectar obstáculos. 2) São apresentados três exercícios de programação usando o sensor de ultrassons para fazer o robô seguir em linha reta, reclamar quando encontrar um obstáculo, e manter distância de um obstáculo. 3) O sensor de ultrassons mede distâncias enviando ondas sonoras e mede o tempo até sua reflexão, permitindo aplicações como ev