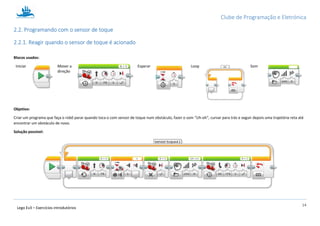
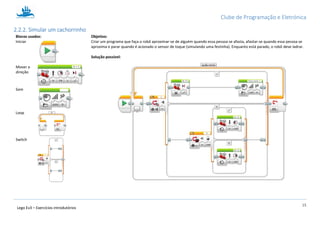
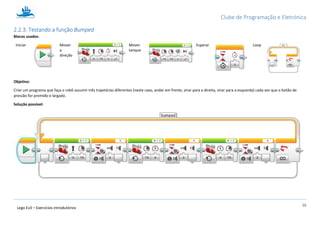
Transferir como PDF, PPTX
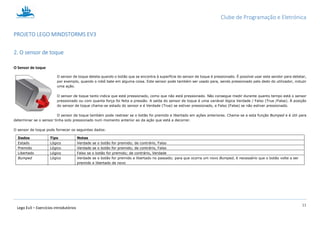
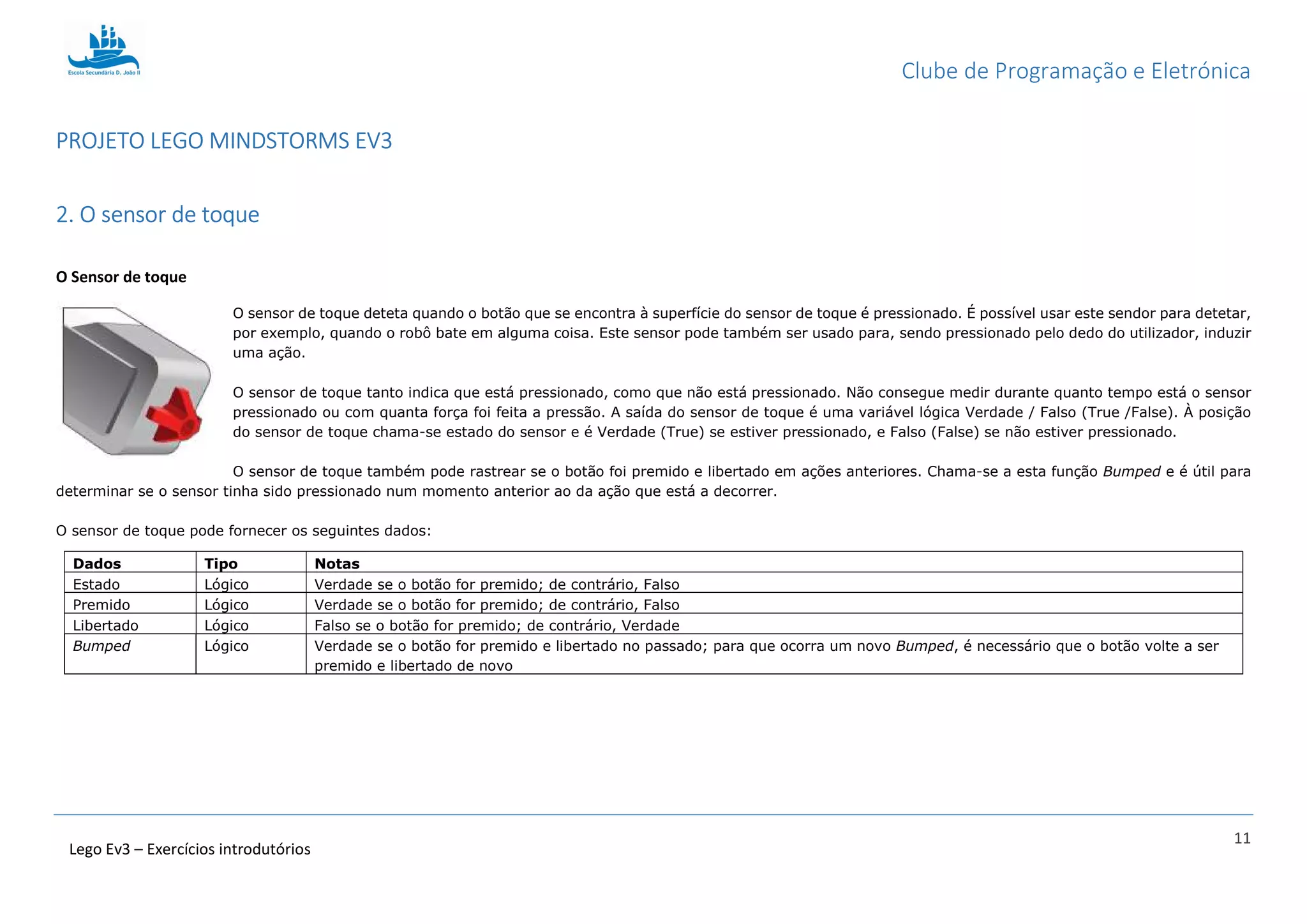
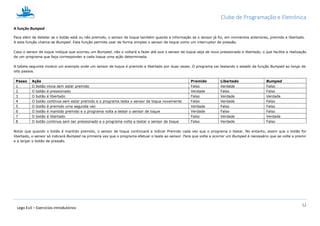

O documento descreve o sensor de toque do Lego Mindstorms EV3, explicando como ele pode detectar quando é pressionado e fornecer dados sobre seu estado atual. É explicado que o sensor pode detectar quando é premido, liberado ou premido e liberado no passado ("Bumped"), e como esses dados podem ser usados em programas para controlar as ações de um robô. Exemplos de programas que usam o sensor de toque são apresentados.











































































