Transferir como PDF, PPTX

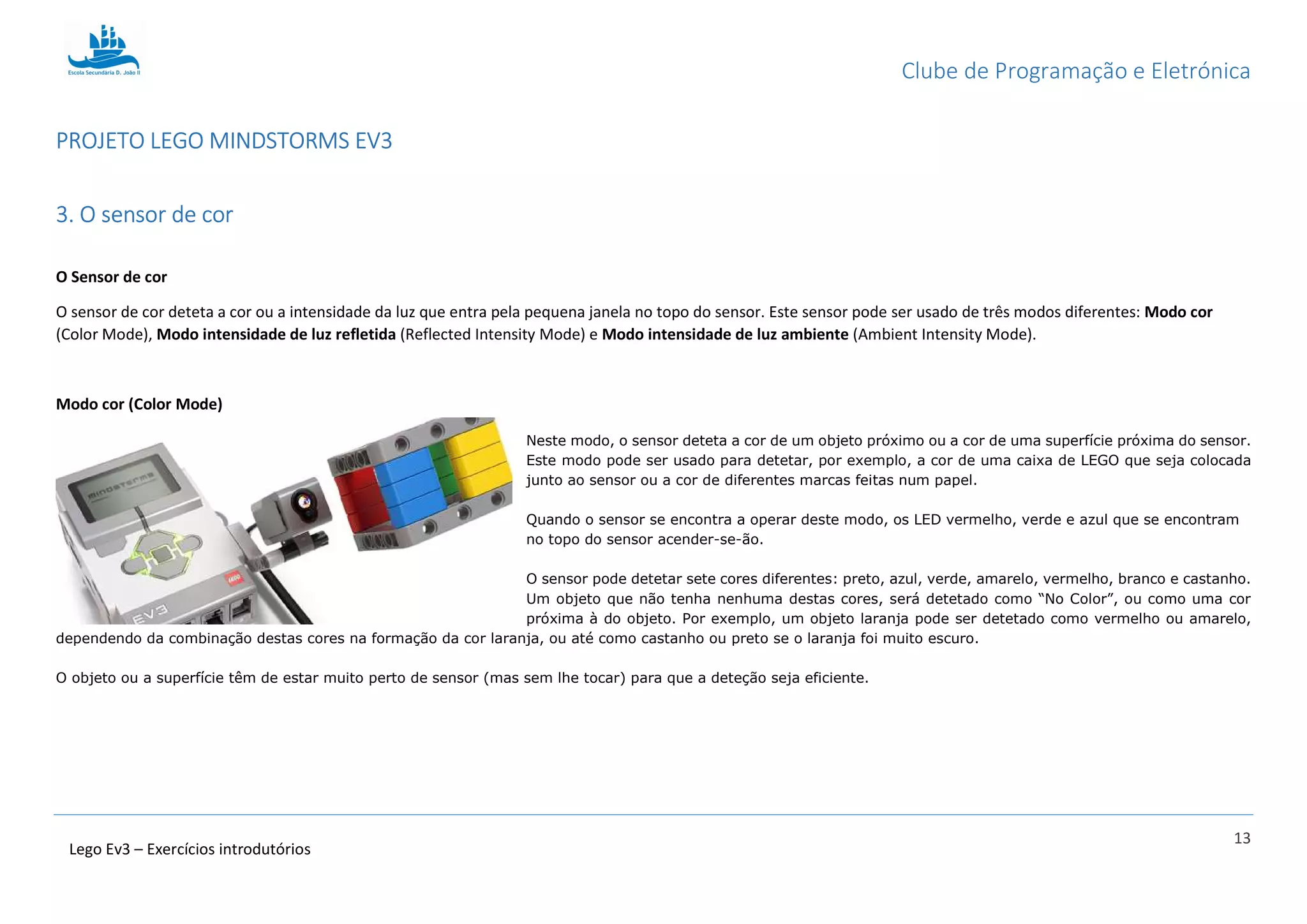

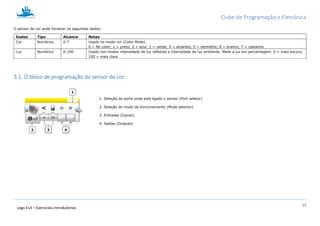

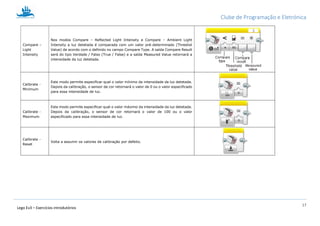
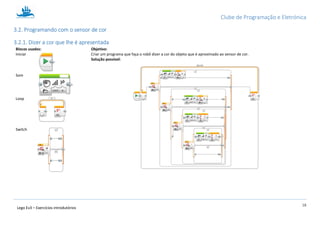
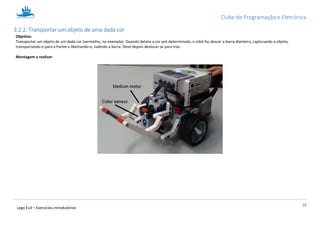



O documento descreve as funcionalidades do sensor de cor do Lego Mindstorms EV3. Explica que o sensor pode operar em três modos - cor, intensidade de luz refletida e intensidade de luz ambiente - e fornece detalhes sobre cada modo. Também fornece exemplos de como programar o robô usando o sensor de cor.