Baixado 689 vezes

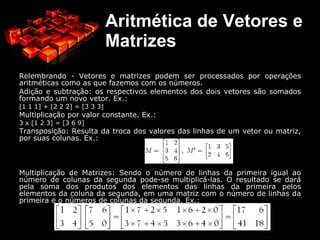

![Adição e subtração: os respectivos elementos dos dois vetores são somados formando um novo vetor. Ex.: [1 1 1] + [2 2 2] = [3 3 3] Multiplicação por valor constante. Ex.: 3 x [1 2 3] = [3 6 9] Transposição: Resulta da troca dos valores das linhas de um vetor ou matriz, por suas colunas. Ex.: Multiplicação de Matrizes: Sendo o número de linhas da primeira igual ao número de colunas da segunda pode-se multiplicá-las. O resultado se dará pela soma dos produtos dos elementos das linhas da primeira pelos elementos da coluna da segunda, em uma matriz com o número de linhas da primeira e o números de colunas da segunda. Ex.: Aritmética de Vetores e Matrizes](https://image.slidesharecdn.com/cg06-100612060625-phpapp02/85/Computacao-Grafica-Transformacoes-Geometricas-no-Plano-e-no-Espaco-11-320.jpg)
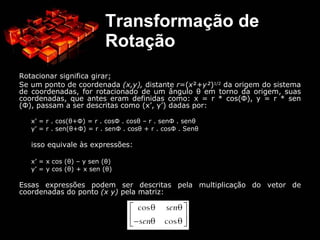
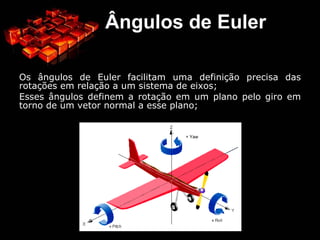
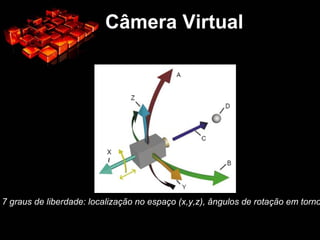
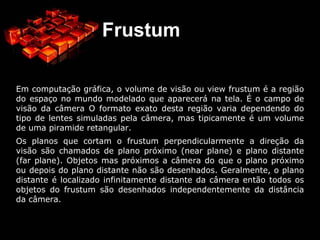
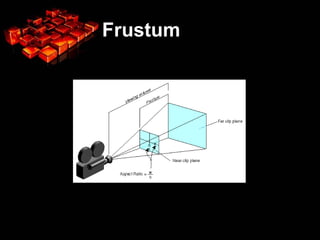
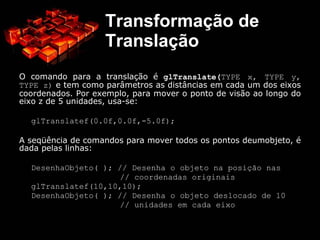
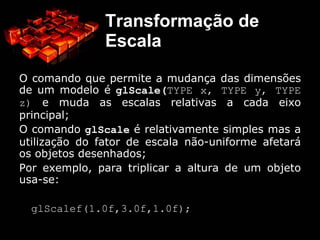
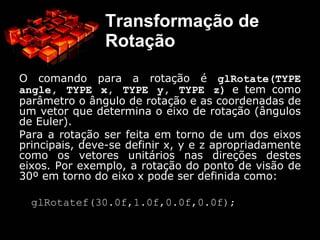

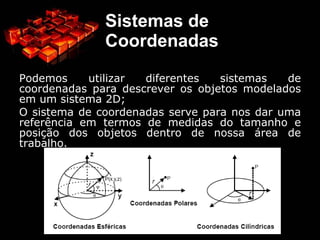
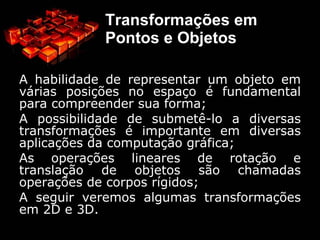
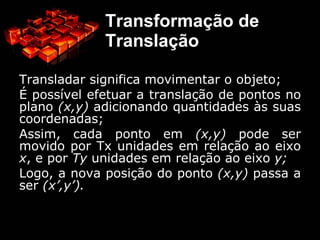
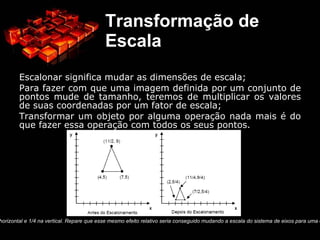
O documento discute transformações geométricas em computação gráfica, incluindo translação, escala e rotação. Explica como matrizes são usadas para representar essas transformações e como elas afetam os pontos e objetos. Também aborda conceitos como sistemas de coordenadas, câmera virtual, frustum e suas implementações em OpenGL.





















![14.3 derivadas parciais [pt. 1]](https://cdn.slidesharecdn.com/ss_thumbnails/14-200827192008-thumbnail.jpg?width=640&height=640&fit=bounds)














































































