Baixado 598 vezes








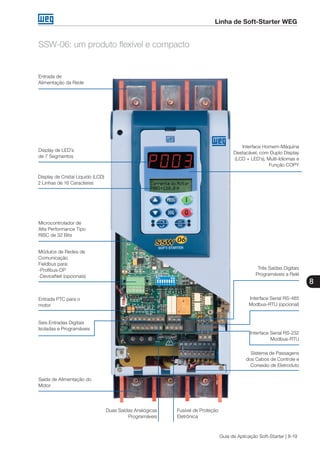
![Como Funciona um Motor de Indução?
2
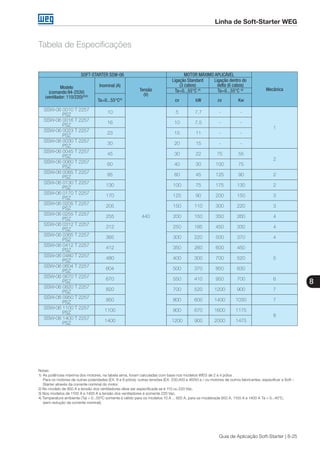
Guia de Aplicação Soft-Starter | 2-3
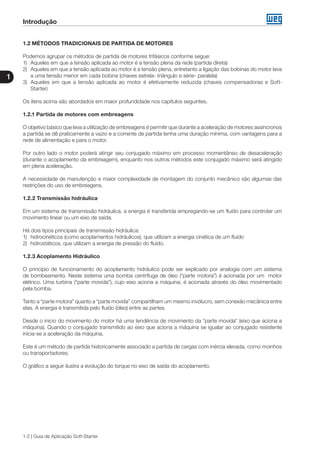
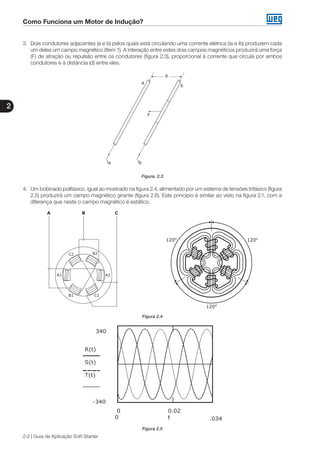
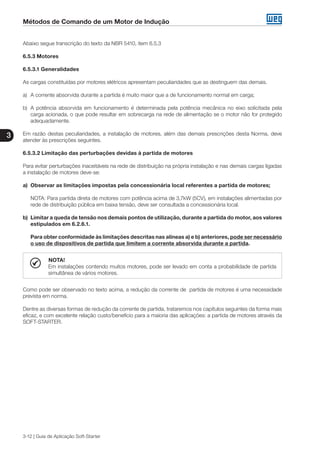
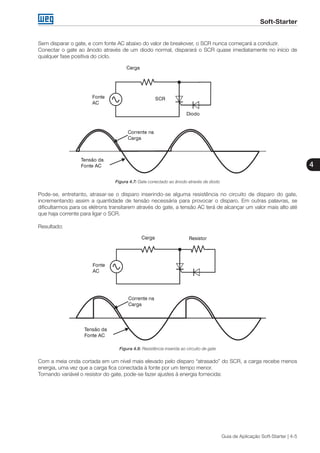
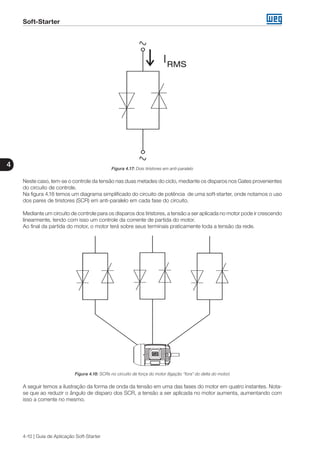
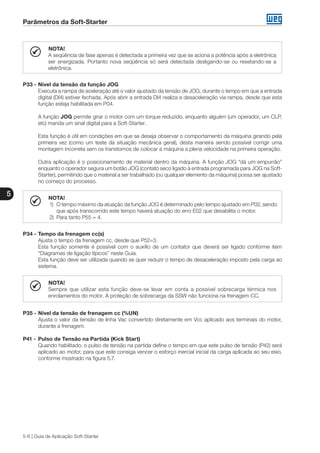
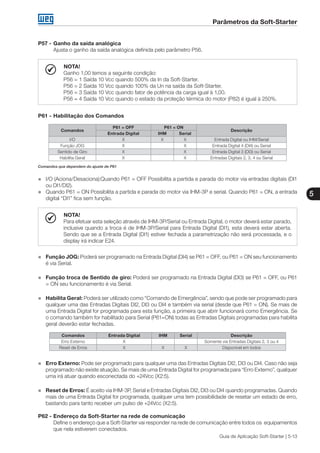
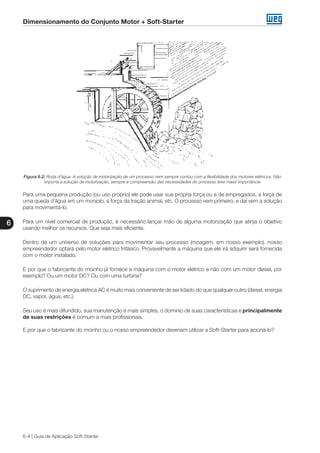
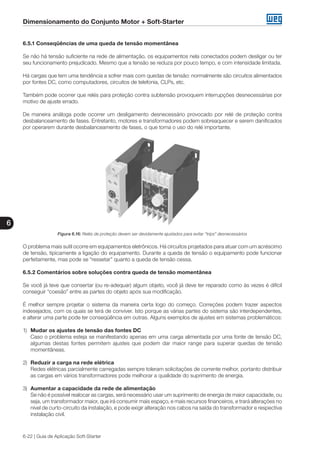
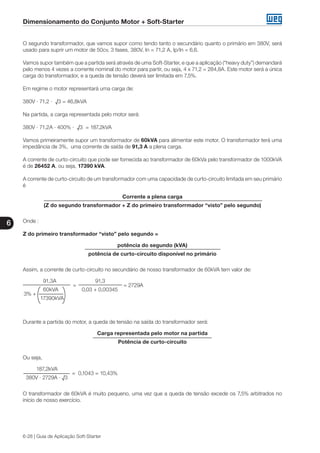
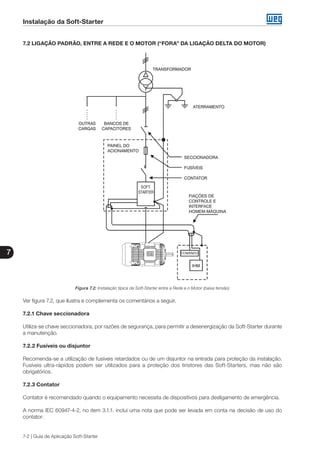
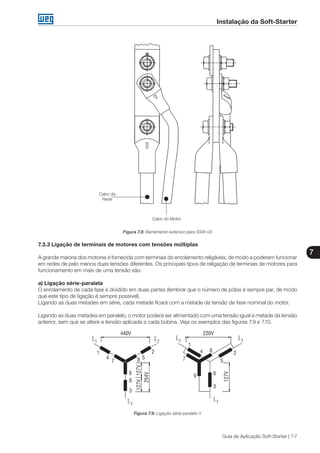
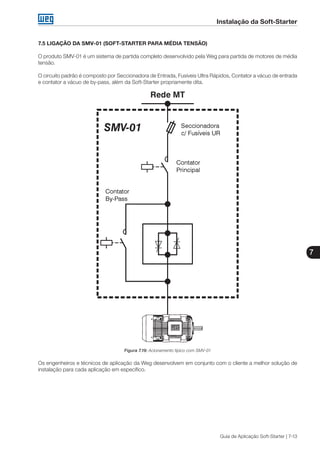
Na figura 2.6, os pontos identificados com os números ... correspondem aos momentos em que a tensão
de uma das três fases é igual a zero. Desta maneira é mais fácil fazer a composição dos vetores de indução
magnética para cada instante. Na figura pode-se ver que a resultante destes vetores está girando (campo girante)
com uma velocidade proporcional a freqüência e ao número de pólos do motor.
Figura 2.6
5. A velocidade do campo girante descrito anteriormente, chamada de velocidade síncrona, é proporcional à
freqüência do sistema de tensões trifásico e ao número de pólos do bobinado.
Velocidade do campo girante [rpm]= (freqüência [1/s] x 120 ) / n° de pólos
6. Conjugado: O conjugado (também chamado de torque, momento ou binário) é a medida do esforço necessário
para girar um eixo. É sabido, pela experiência prática, que para levantar um peso por um processo semelhante ao
usado em poços de água – ver figura 2.7 – a força F que é preciso aplicar à manivela depende do comprimento
da manivela.
Quanto maior a manivela, menor será a força necessária.
Se dobrarmos o tamanho da manivela, a força F necessária será diminuída a metade. No exemplo da figura
2.7, se o balde pesa 20kgf e o diâmetro do tambor é 20 cm, a corda transmitirá uma força de 20 kgf na
superfície do tambor, isto é, a 0,1m (10cm) do centro do eixo.
Para contrabalançar esta força, precisamos de 10 kgf na manivela, se o comprimento “a” for 0,2 m (20cm).
Se “a” for o dobro, isto é 0,4 m, a força F será a metade, ou seja, 5kgf.
Como se vê, para medir o “esforço” necessário para fazer girar o eixo não basta definir a força empregada: é
preciso também dizer a que distância do eixo a força é aplicada. O “esforço” é medido pelo conjugado, que
é o produto F x a , da “força” pela “distância”.
No exemplo citado, o conjugado vale:
C = 20 kgf x 0,1 m = 10 kgf x 0,2 m = 5 kgf x 0,4 = 2mkgf](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-14-320.jpg)




















![Parâmetros da Soft-Starter
5
5-8 | Guia de Aplicação Soft-Starter
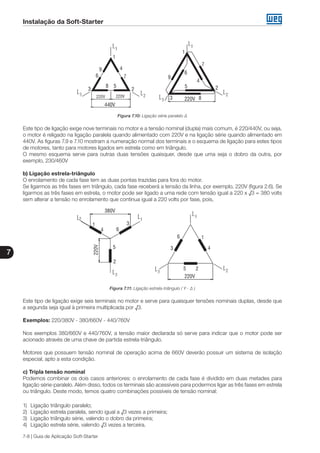
Ajuste final da função de controle de bombas:
NOTA!
Este ajuste somente deve ser feito para melhorar o desempenho do controle de bombas quando a
motobomba já estiver instalada e apta a funcionar em regime pleno.
1. Colocar P45 (Pump Control) em “On”.
2. Ajustar P14 (Subcorrente) ou colocar P15 (Tempo de Subcorrente) em “OFF” até o fim do ajuste.
Depois reprogramá-lo.
3. Verificar o correto sentido de giro do motor, indicado na carcaça da bomba.
4. Ajustar P01 (Tensão inicial % UN) no nível necessário que comece a girar o motor, sem que haja
trepidação.
5. Ajustar P02 (Tempo de aceleração [s]) para o tempo de partida exigido pela carga.
Com o auxílio do manômetro da tubulação, verificar o aumento da pressão, que deve ser contínua
até o nível máximo exigido sem que haja “overshoots”. Se houver, aumente o tempo de aceleração
até reduzir ao máximo esses “overshoots” de pressão.
6. P03 (Degrau de tensão % uN) usar esta função para provocar uma queda imediata ou mais linear
de pressão na desaceleração da moto-bomba.
7. P04 (Tempo de desaceleração) com o auxílio do manômetro, ao desacelerar o motor, deve-se
verificar a contínua queda de pressão até que se atinja o nível mínimo sem que haja o golpe de
Aríete no fechamento da válvula de retenção. Se houver, aumente o tempo de desaceleração
até reduzir ao máximo as oscilações.
NOTA!
„„ Se não houver manômetros de observação nas tubulações hidráulicas os golpes de Aríetes
podem ser observados através das válvulas de alívio de pressão.
„„ Tempos de aceleração e desaceleração muito grandes sobreaquecem os motores. Programe
os tempos mínimos necessários para sua aplicação.
P47 - Tempo para auto-reset (s)
Quando ocorre um erro, exceto E01, E02 e E07 ou E2x, a Soft-starter poderá provocar um “reset”
automaticamente, após transcorrido o tempo programado em P47.
Se P47= OFF não ocorrerá “Auto-Reset”. Após transcorrido o “Auto-Reset”, se o mesmo erro voltar a ocorrer
por três vezes consecutivas (*), a função de “Auto-reset” será inibida. Portanto, se um erro ocorrer quatro
vezes consecutivas, este permanecerá sendo indicado (e a Soft-Starter bloqueada) permanentemente.
(*) Um erro é considerado reincidente, se este voltar a ocorrer até 60 segundos após o último erro ter ocorrido.
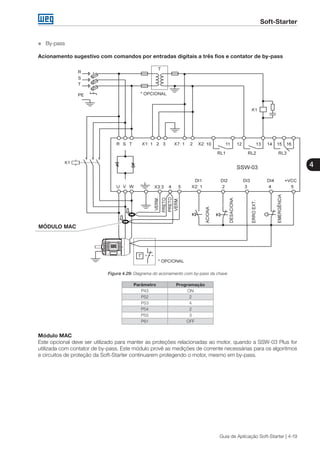
5.3 PARÂMETROS DE CONFIGURAÇÃO
P43 - Relé By- Pass
Esta função quando habilitada permite a utilização da indicação de Tensão Plena, através do RL1 ou RL2
(P51 ou P52), acionar um contador de By-Pass.
A principal função do By-Pass da soft-starter é eliminar as perdas em forma de calor ocasionadas pela
Soft-Starter.
NOTA!
1) Sempre que for utilizado o contator de by-pass deve-se programar esta função.
2) Para não perder as proteções referentes a leitura de corrente do motor, os transformadores de
corrente deverão ser colocados externamente a conexão do contador de by-pass através do
módulo MAC-0x.
3) Quando P43 em “On” os parâmetros P74 e P76 ficam inativos “OFF”.](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-59-320.jpg)






























































![Anexo 1 - Cálculo do Momento de Inércia de Massa
9
Guia de Aplicação Soft-Starter | 9-1
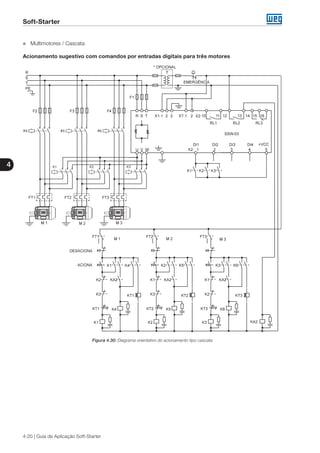
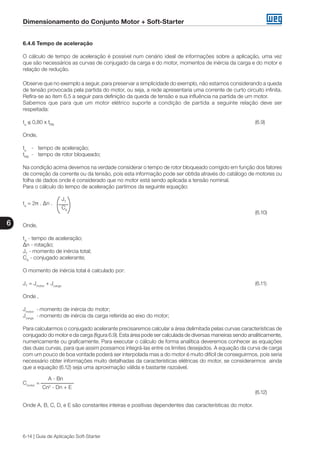
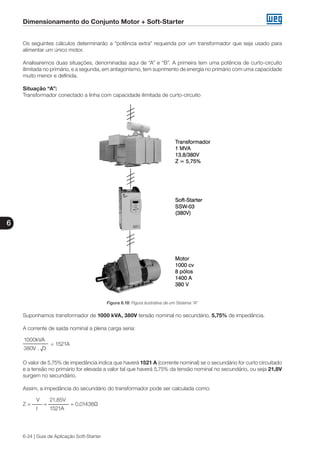
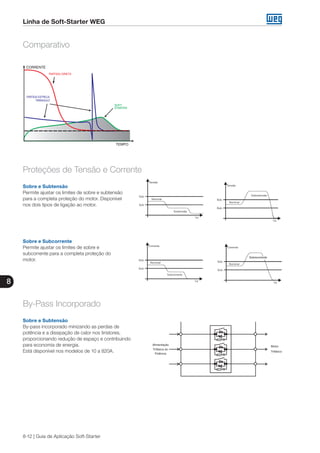
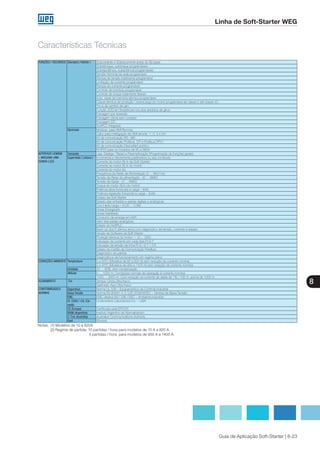
ANEXO 1 - CÁLCULO DO MOMENTO DE INÉRCIA DE MASSA
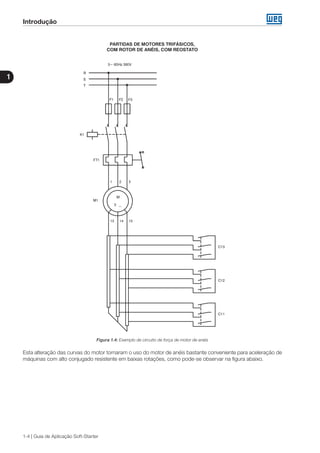
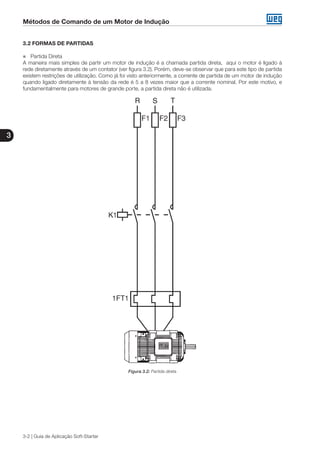
1. MOMENTO DE INÉRCIA DE FORMAS SIMPLES
A seguir são apresentadas as expressões para o cálculo do momento de inércia de massa J [kgm2
] de formas
geométricas simples, em relação ao seu eixo baricêntrico, ou seja, o eixo que passa pelo seu centro de gravidade.
Todas as unidades deverão ser as do Sistema Internacional (SI).
Serão utilizadas as seguintes notações:
m – massa [kg]
ρ – massa específica [kg/m3
]
D – diâmetro externo [m]
d – diâmetro interno [m]
Db
– diâmetro da base [m]
l – comprimento [m]
a, b – lados [m]
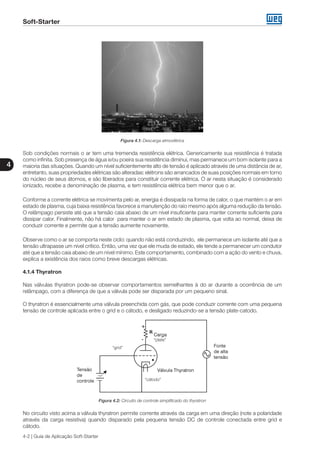
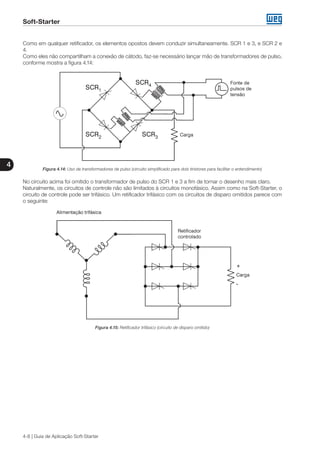
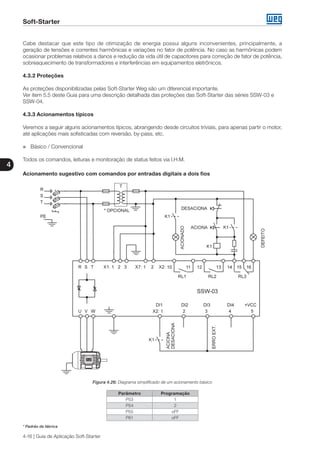
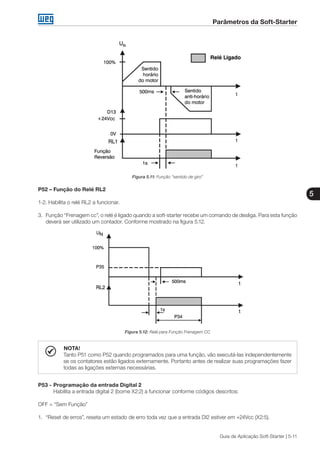
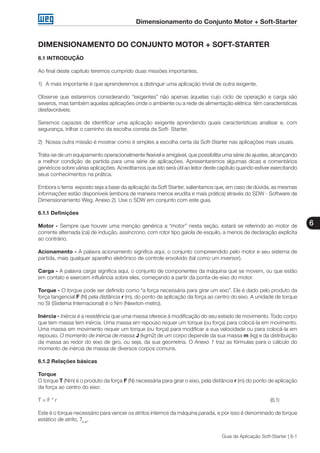
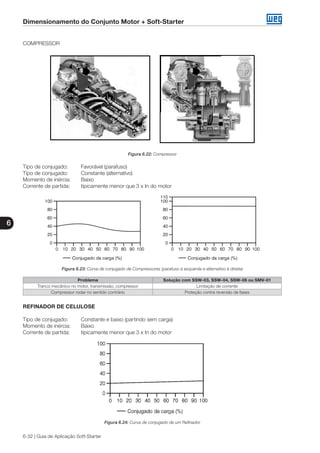
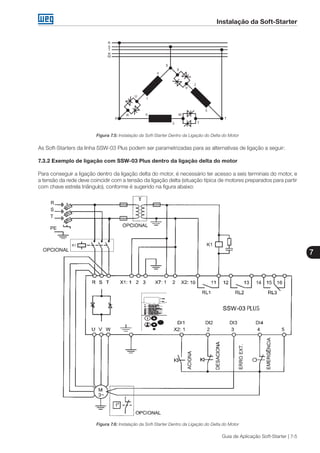
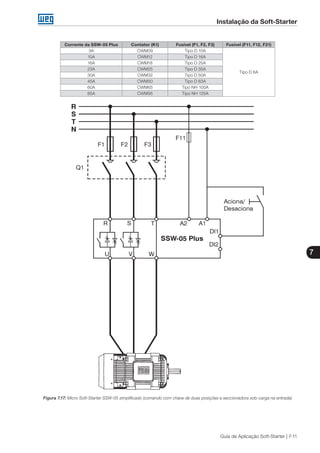
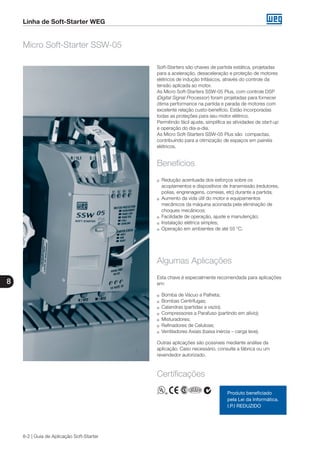
a) Disco ou cilindro maciço
O momento de inércia de massa de um disco, ou de um cilindro maciço, referido ao seu eixo longitudinal é
J = 1/8 * m * D2
[kgm2
],
(A1.1)
ou
J = π/32 * ρ * D4
* l [kgm2
]
(A1.2)
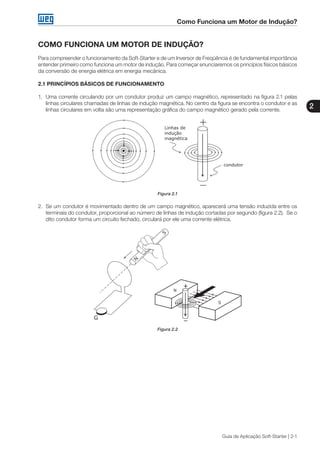
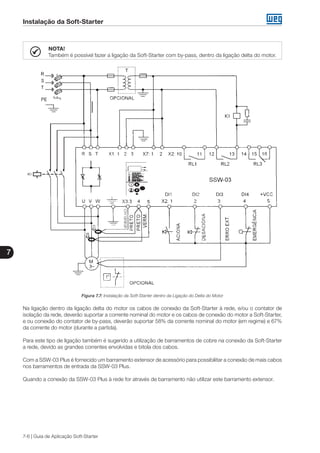
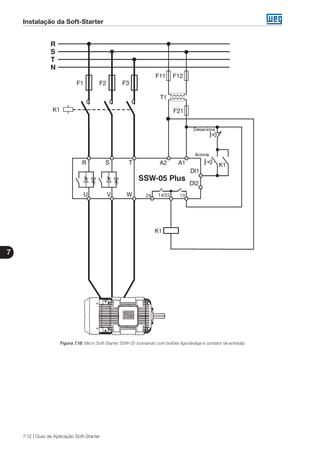
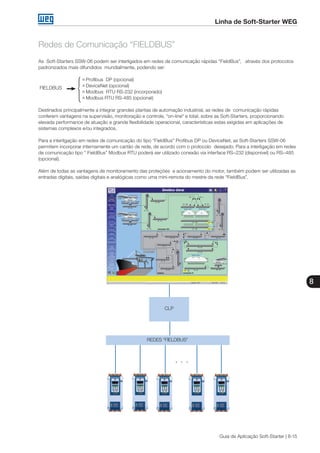
b) Cilindro oco](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-164-320.jpg)
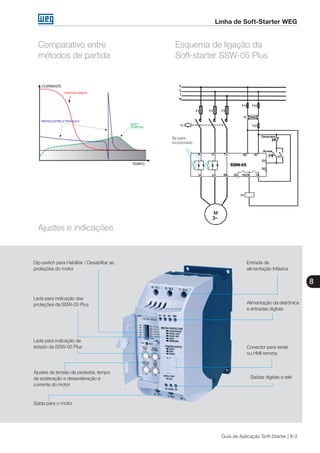
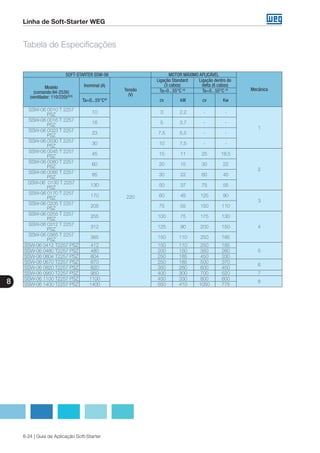
![Anexo 1 - Cálculo do Momento de Inércia de Massa
9
9-2 | Guia de Aplicação Soft-Starter
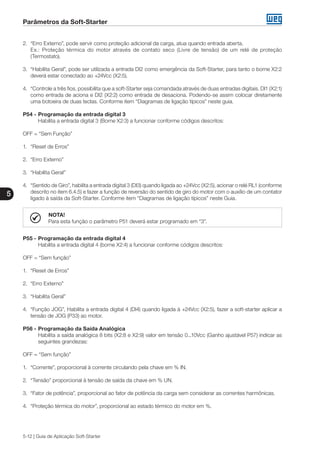
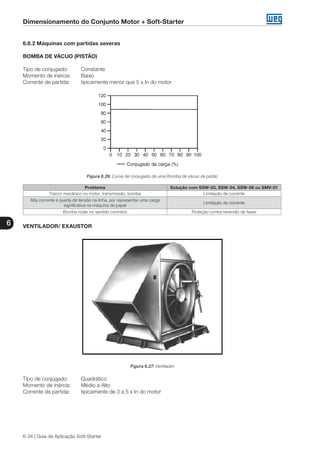
J = 1/8 * m * (D2
+ d2
) [kgm2
]
(A1.3)
ou
J = π/32 * ρ * (D4
- d4
) * l [kgm2
]
(A1.4)
c) Paralelepípedo
J = 1/12 * m * (a2
+ b2
) [kgm2
]
(A1.5)
ou
J = 1/12 * ρ * (a3
b + ab3
) * l [kgm2
]
(A1.6)
d) Cone
J = 3/40 * m * Db
2
[kgm2
]
(A1.7)
ou
J = π/160 * ρ * Db
4
* l [kgm2
]
(A1.8)](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-165-320.jpg)
![Anexo 1 - Cálculo do Momento de Inércia de Massa
9
Guia de Aplicação Soft-Starter | 9-3
2. TEOREMA DOS EIXOS PARALELOS
O momento de inércia de massa J’ [kgm2
] de um corpo em relação a um eixo paralelo ao seu eixo baricêntrico
é dado por
J’ = J + m * e2
(A1.9)
Sendo: e – distância entre os eixos [m], e
J – momento de inércia de massa em relação ao eixo baricêntrico
3. MOMENTO DE INÉRCIA DE FORMAS COMPOSTAS
Exemplo:
J1
= 1/8 * m1
* (D1
2
+ d1
2
) [kgm2
]
J2
= 1/8 * m2
* D1
2
+ d2
2
) [kgm2
]
J3
= 1/8 * m3
* (D2
2
+ d2
2
) [kgm2
]
J4
= 1/8 * m4
* D2
2
[kgm2
]
ou
J1
= (π * ρ) / 32 * (D1
4
– d1
4
) * I1
J2
= (π * ρ) / 32 * (D1
4
– d2
4
) * I2
J3
= (π * ρ) / 32 * (D2
4
– d2
4
) * I3
J4
= (π * ρ) / 32 * D2
4
* I4
J = J1
+ J2
+ J3
+ J4
[kgm2
]
Onde:
mi
- massa de cada primitiva i da peça [kg]
D1
, D2
- diâmetros externos [m]
d1
, d2
- diâmetros internos [m]
Ii
- comprimentos de cada primitiva i da peça [m]](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-166-320.jpg)
![Anexo 1 - Cálculo do Momento de Inércia de Massa
9
9-4 | Guia de Aplicação Soft-Starter
4. MOMENTO DE INÉRCIA DE CORPOS QUE SE MOVEM LINEARMENTE
O momento de inércia de uma massa m [kg] que se move linearmente reflete-se no seu eixo de acionamento
da seguinte forma:
4.1 Acionamento através de parafuso de movimento (fuso)
J = m * (p / 2π)2
[kgm2
]
(A1.10)
Sendo:
p – passo do fuso [m]
4.2 Acionamento através de pinhão/cremalheira, ou tambor/cabo, ou ainda rolete/esteira
J = m * r2
[kgm2
]
(A1.11)
Sendo:
r – raio primitivo do pinhão, ou raio externo do tambor ou rolete [m]
5. TRANSMISSÃO MECÂNICA
O momento de inércia de massa é refletido do eixo de saída (2) para o eixo de entrada (1) de uma transmissão
de acordo com a seguinte expressão:
J1
= J2
/ i2
(A1.12)
Onde:
J2
– momento de inércia [kgm2
] no eixo de saída (2), com rotação n2
[rpm]
J1
– momento de inércia [kgm2
] no eixo de entrada (1), com rotação n1
[rpm]
i – razão de transmissão (i = n1
/ n2
)
6. EXEMPLOS DE CÁLCULOS DE MOMENTO DE INÉRCIA DE MASSA
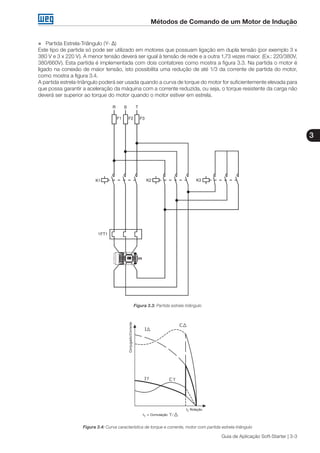
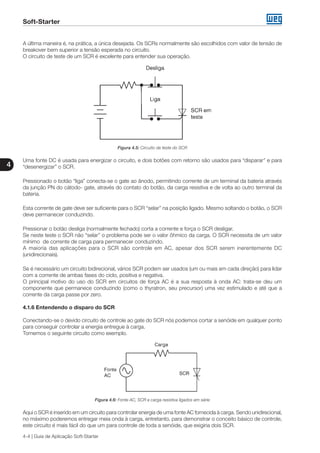
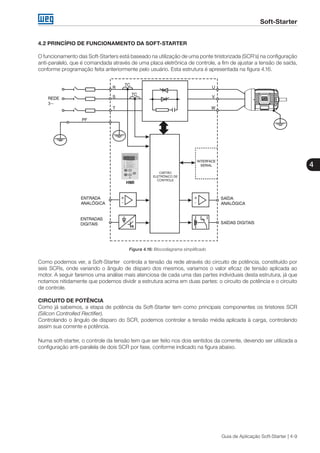
6.1 Calcular o momento de inércia de massa J do volante mostrado na figura abaixo
a) Momento de inércia do volante maciço
J1
= (π * ρ) / 32 * d1
4
* I1](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-167-320.jpg)
![Anexo 1 - Cálculo do Momento de Inércia de Massa
9
Guia de Aplicação Soft-Starter | 9-5
b) Momento de inércia dos alívios laterais (negativo)
J2
= (π * ρ) / 32 * d2
4
* (I1
– I2
)
c) Momento de inércia dos excessos laterais do cubo (positivo)
J3
= (π * ρ) / 32 * d3
4
* (I3
– I2
)
d) Momento de inércia do furo do cubo (negativo)
J4
= (π * ρ) / 32 * d4
4
* I3
e) Momento de inércia de um furo da alma
J5
= (π * ρ) / 32 * d5
4
* I2
f) Transposição de e) para o eixo baricêntrico do volante
J’5
= [(π * ρ) / 32 * d5
4
* I2
] + [(π * ρ) / 16 * d5
2
* d6
2
* I2
]
J’5
= (π * ρ) / 32 * d5
2
* I2
* (d5
2
+ d6
2
)
g) Momento de inércia de massa do volante
J = J1
– J2
+ J3
– J4
– (4 * J’5
)
J = (π * ρ) / 32 * {d1
4
* I1
– d2
4
* (I1
– I2
) + d3
4
*
(I3
– I2
) – d4
4
* I3
– 4 * [d5
2
* I2
* (d5
2
+ 2 * d6
2
)]}
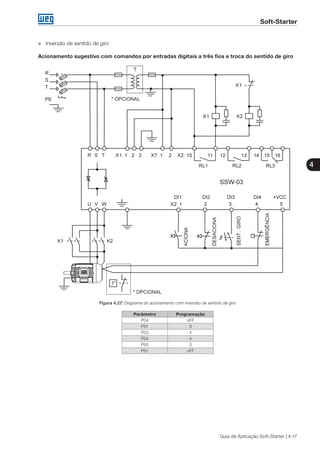
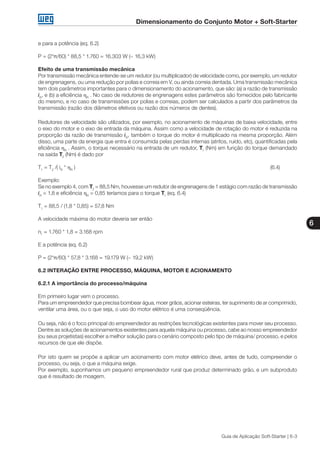
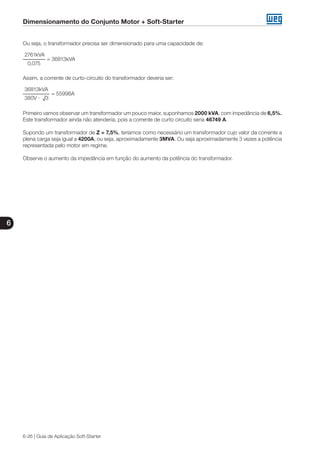
6.2 Para o sistema mostrado no diagrama abaixo, calcular o momento de inércia total referido ao
eixo do motor
Dados:
JM
= momento de inércia de massa do rotor do motor [kgm2
]
JP1
= momento de inércia de massa da polia motora P1
[kgm2
]
JP2
= momento de inércia de massa da polia movida P2
[kgm2
]
I = razão de transmissão (i = n1
/ n2
)
JF
= momento de inércia de massa do fuso de esferas recirculantes [kgm2
]
pF
= passo da rosca do fuso de esferas recirculantes [m]
mM
= massa móvel da mesa da máquina [kg]
mP
= massa da peça [kg]
Logo,
JTOt
= JM
+ JP1
+ (1/I2
) * [JP2
+ JF
+ (pF
/2π)2
* (mM
+ mP
)]](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-168-320.jpg)
















![Anexo 3 - Check-List para detalhamento da aplicação
Guia de Aplicação Soft-Starter | 11-1
11
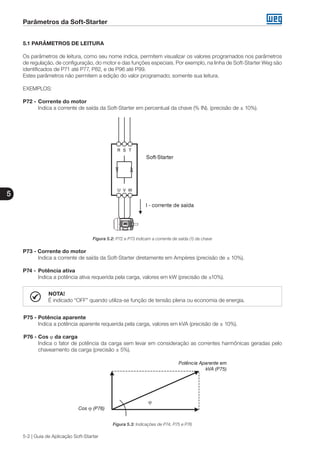
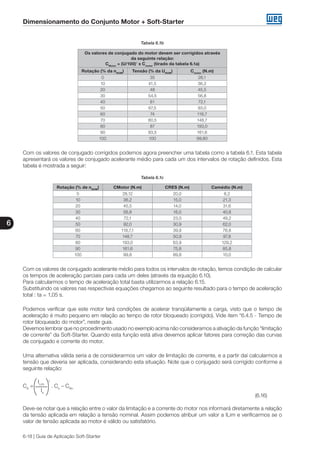
ANEXO 3 - FOLHA DE DADOS PARA DIMENSIONAMENTO -
SOFT-STARTER
Dados Gerais
Empresa: Tel.:
Cidade / Estado: Fax:
Pessoa de Contato: E-mail:
Aplicação / Carga:
Dados da Aplicação
Potência Nominal: Nº de Pólos / Rotação Nominal: Tensão e Corrente de Placa:
........................ CV [ ] 2 Pólos (3600 rpm) [ ] 220 V ⇒ ............A
Fator de Serviço: [ ] 4 Pólos (1800 rpm) [ ] 380 V ⇒ ............A
F.S. = ....................... [ ] 6 Pólos (1200 rpm) [ ] 440 V ⇒ ............A
[ ] 8 Pólos ( 900 rpm) [ ] ....... V ⇒ ............A
É utilizado? [ ] ..... Pólos (........... rpm)
[ ] Não Faixa de Rotação desejada: Número de Partida por hora:
[ ] Sim De ................ a ................ rpm .................. Partidas / Hora
Tipo de Carga: Conjugado resistente da carga referido ao eixo do motor:
[ ] Bomba ........................ Nm
[ ] Bomba Centrífuga ........................ kgfm
[ ] Compressor a Pistão
[ ] Compressor a Parafuso
[ ] Ventilador e Exaustor Inércia da carga referida ao eixo do motor:
[ ] Misturador ........................ kgm2
[ ] Centrífugas
[ ] Outras
Rede de Alimentação Condições do Ambiente para Instalação:
[ ] 220 V Altitude: Atmosfera: Temperatura:
[ ] 380 V [ ] 50 Hz [ ] Até 1000m [ ] Normal [ ] Até 40 ºC
[ ] 440 V [ ] 60 Hz [ ] ................ m [ ] Agressiva [ ] ............ ºC
[ ] ............... V (especificar nas Obs.)
Grau de Proteção Necessário: Método de Comando:
[ ] IP 00 (aberto sem proteção) [ ] Botões Liga e Desliga
[ ] IP 20 (proteção contra toques) [ ] Interface Homem-Máquina
[ ] IP 54 (fechado - montado em painel [ ] Entrada Analógica (CLP ou SDCD)
[ ] Ao Tempo (painel especial para chuva)
[ ] ......................................... (especificar nas Obs.)
Observações:
Caso seja necessário fornecer mais informações específicas, favor enviar em anexo.
MOTOR
CARGA
INSTALAÇÃO](https://image.slidesharecdn.com/guiadeaplicaodesoft-starters-140425104851-phpapp02/85/Guia-de-aplicacao-de-soft-starters-186-320.jpg)



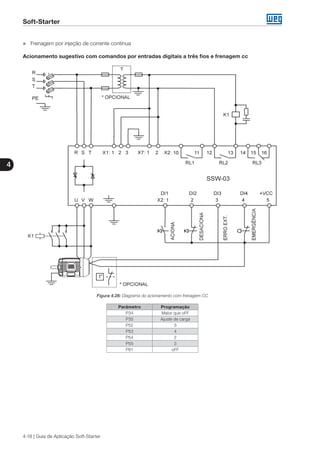
Este documento fornece um guia sobre soft-starters, discutindo métodos tradicionais de partida de motores, o funcionamento de motores de indução, métodos de comando, soft-starters, parâmetros, dimensionamento e instalação. Inclui anexos sobre cálculo de momento de inércia e um software de dimensionamento.


































































![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)




















