Baixado 227 vezes



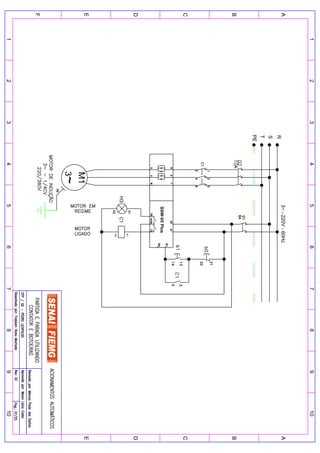

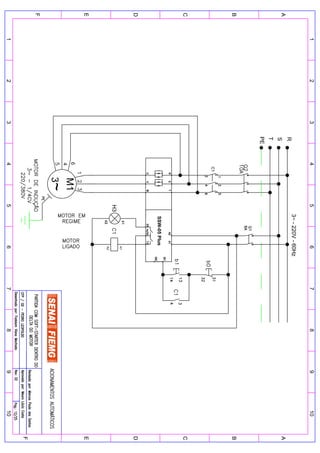
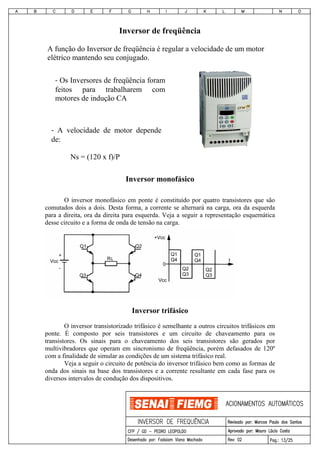
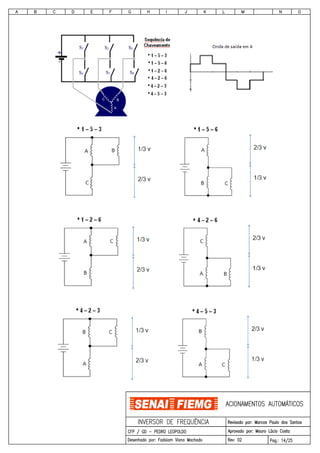
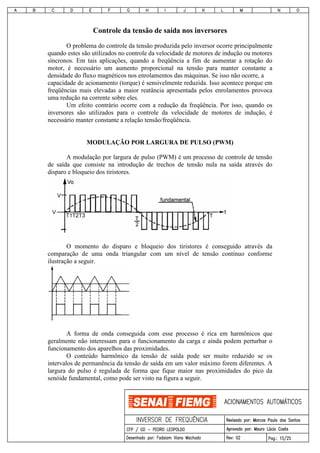


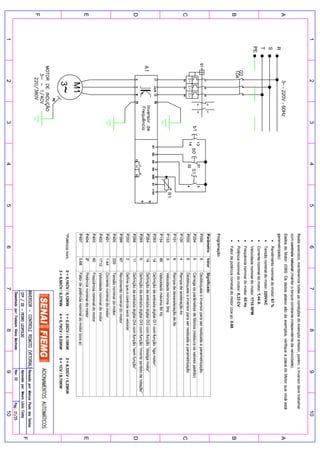
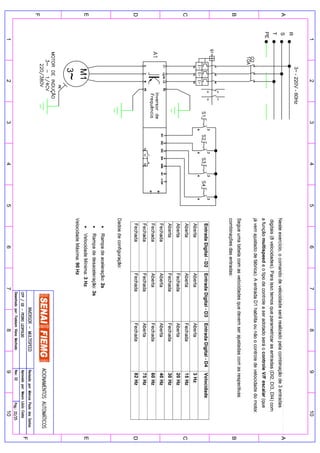
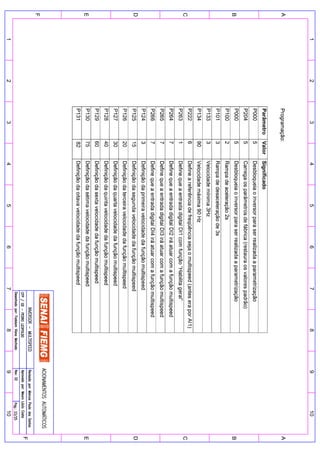

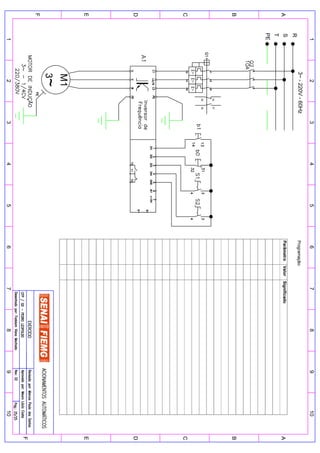

O documento descreve o funcionamento e aplicações de soft-starters e inversores de frequência. Soft-starters reduzem a tensão inicial para prover partida suave de motores, enquanto inversores controlam a frequência para regular a velocidade do motor e fornecer controle de torque. Inversores usam técnicas como PWM para gerar saídas não senoidais e controlar a velocidade do motor.




































![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)






















