Transferir como PDF, PPTX


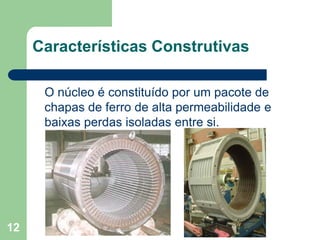
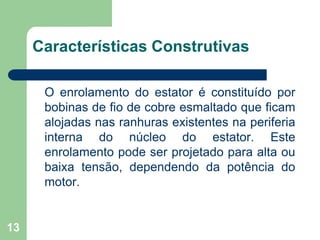

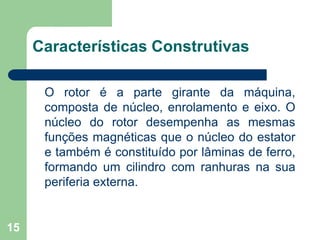

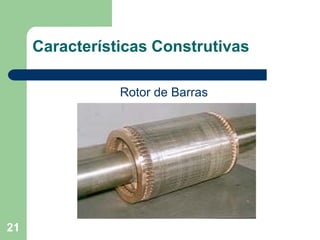

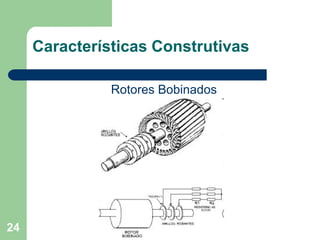

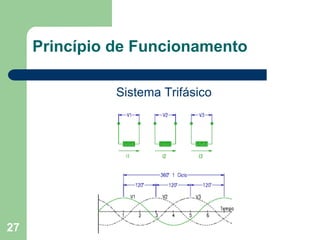

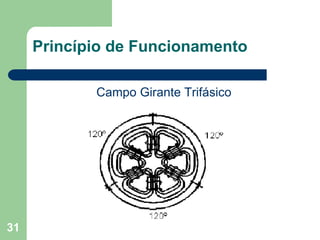
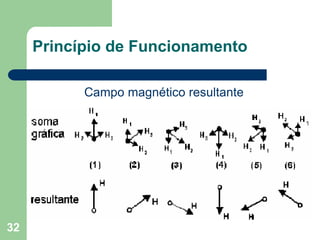
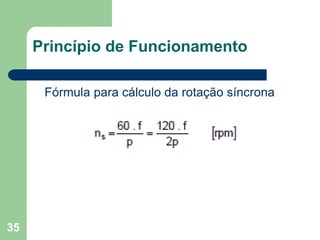
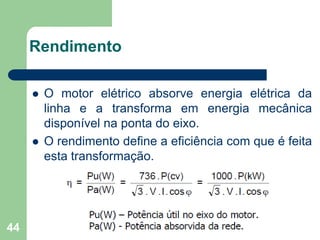
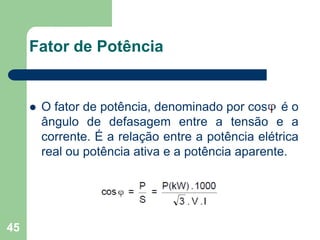
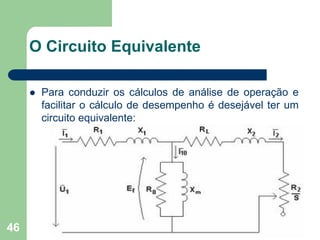
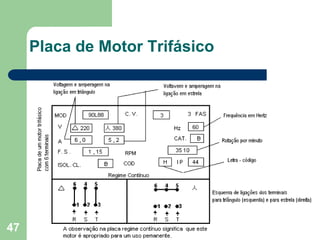

O documento descreve as características e o funcionamento do motor de indução trifásico. Ele discute os principais componentes do motor como o estator, rotor e enrolamentos, além de explicar o princípio do campo magnético girante criado pelas correntes trifásicas. Também aborda tópicos como velocidade síncrona, escorregamento, rendimento e categorias de motores de indução.









![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)






![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)






























