Baixado 288 vezes











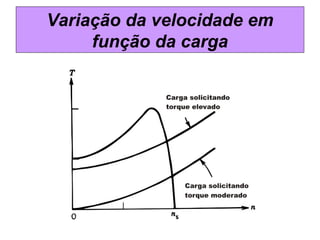

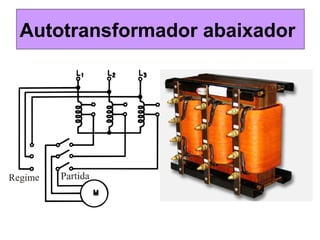
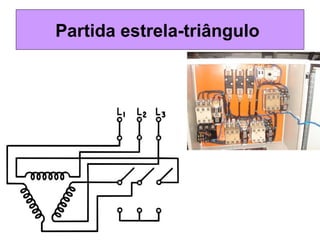
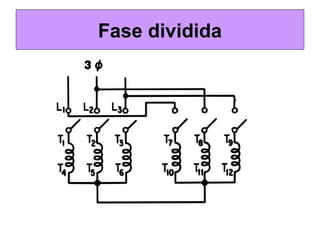
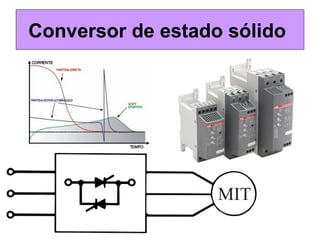







O documento descreve máquinas elétricas, especificamente motores de indução. Define máquinas elétricas e seus tipos principais, motores de indução e seu princípio de funcionamento, métodos de partida e controle de velocidade destes motores. Apresenta também influências da rede elétrica e da carga mecânica em sua operação.











































































