Baixado 15 vezes









![De…nição 10. Uma equação linear com n incógnitas x1; x2; :::; xn é uma equação da
forma
a1x1 + a2x2 + ::: + anxn = b;
em que a1; a2; :::; an e b são constantes (reais ou complexas). A b chama-se termo indepen-
dente.
De…nição 11. Um sistema de m equações lineares com n incógnitas é um conjunto
de equações da forma
( )
8
>><
>>:
a11x1 + a12x2 + ::: + a1nxn = b1
a21x1 + a22x2 + ::: + a2nxn = b2
:::
am1x1 + am2x2 + ::: + amnxn = bm
em que aij e bk são constantes (reais ou complexas), para i; k = 1; :::; m e j = 1; :::; n.
Usando o produto de matrizes de…nido na secção anterior, o sistema de equações lineares
acima pode ser escrito como uma equação matricial
AX = B
em que
A =
2
6
6
6
4
a11 a12 a1n
a21 a22 a2n
...
...
...
am1 am2 amn
3
7
7
7
5
, X =
2
6
6
6
4
x1
x2
...
xn
3
7
7
7
5
e B =
2
6
6
6
4
b1
b2
...
bm
3
7
7
7
5
.
A matriz A é a matriz dos coe…cientes do sistema, X é a matriz coluna das incógnitas
e B é a matriz coluna dos termos independentes. A matriz
[A j B] =
2
6
6
6
4
a11 a12 a1n j b1
a21 a22 a2n j b2
...
...
...
...
...
am1 am2 amn j bm
3
7
7
7
5
associada ao sistema ( ) chama-se matriz aumentada do sistema.
MUITO IMPORTANTE: Note que
AX =
2
6
6
6
4
a11
a21
...
am1
3
7
7
7
5
x1 +
2
6
6
6
4
a12
a22
...
am2
3
7
7
7
5
x2 + ::: +
2
6
6
6
4
a1n
a2n
...
amn
3
7
7
7
5
xn.
10](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-10-320.jpg)


![Teorema 8. Seja A uma matriz do tipo n n.
(i) O sistema AX = B tem solução única se e só se A fôr invertível. Neste caso a solução
geral é
X = A 1
B:
(ii) O sistema homogéneo AX = 0 tem solução não trivial se e só se A fôr não invertível.
Teorema 9. (i) Sejam A e B duas matrizes do tipo n n. Se AB é invertível, então A
e B são invertíveis.
(ii) Se A é uma matriz do tipo n n tal que AB = I então BA = I e B = A 1
:
Dem. (i) Considere o sistema (AB) X = 0. Se B não fosse invertível, então pelo teorema
anterior existiria X 6= 0 tal que BX = 0. Logo, X 6= 0 seria solução não trivial de ABX = 0,
o que contraria o teorema anterior uma vez que por hipótese AB é invertível. Assim, B
é invertível. Finalmente, A é invertível por ser o produto de duas matrizes invertíveis:
A = (AB) B 1
.
(ii) Atendendo à alínea anterior, B é invertível. Logo B 1
também é invertível e
A = AI = A BB 1
= (AB) B 1
= IB 1
= B 1
,
isto é, A é invertível e A 1
= (B 1
)
1
= B.
De…nição 14. (i) Às seguintes operações que se podem aplicar às equações de um
sistema de equações lineares, chamam-se operações elementares.
(a) Trocar a posição de duas equações do sistema;
(b) Multiplicar uma equação por um escalar diferente de zero;
(c) Substituição de uma equação pela sua soma com um múltiplo escalar de outra
equação.
(ii) Dois sistemas de equações lineares que se obtêm um do outro através de um número
…nito de operações elementares, dizem-se equivalentes.
Observação 6. (i) Dois sistemas de equações lineares que se obtêm um do outro através
de um número …nito de operações elementares, têm o mesmo conjunto solução.
(ii) Quando aplicamos operações elementares às equações de um sistema de equações
lineares, só os coe…cientes e os termos independentes do sistema são alterados. Logo, aplicar
as operações elementares anteriores às equações de um sistema linear ( ) equivale a aplicar
às linhas da matriz aumentada
[A j B] =
2
6
6
6
4
a11 a12 a1n j b1
a21 a22 a2n j b2
...
...
...
...
...
am1 am2 amn j bm
3
7
7
7
5
as seguintes operações.
13](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-13-320.jpg)
![De…nição 15. As operações elementares que podem ser aplicadas às linhas (i e j)
de uma matriz são:
(i) Trocar a posição de duas linhas (i e j) da matriz: Li $ Lj
(ii) Multiplicar uma linha (i) da matriz por um escalar ( ) diferente de zero: Li ! Li
(iii) Substituição de uma linha (j) pela sua soma com um múltiplo escalar ( ) de outra
linha (i): Li + Lj ! Lj
Teorema 10. Se dois sistemas lineares AX = B e CX = D são tais que a matriz
aumentada [C j D] é obtida de [A j B] através de uma ou mais operações elementares, então
os dois sistemas são equivalentes.
De…nição 16. Uma matriz A = (aij)m n diz-se em escada de linhas se:
(i) Todas as linhas nulas (formadas inteiramente por zeros) estão por baixo das linhas
não nulas;
(ii) Por baixo (e na mesma coluna) do primeiro elemento não nulo de cada linha e por
baixo dos elementos nulos anteriores da mesma linha, todas as entradas são nulas. Esse
primeiro elemento não nulo de cada linha tem o nome de pivot.
Exemplo 9. As seguintes matrizes estão em escada de linhas:
A1 =
4 1
0 0
; A2 =
0 1 3 0
0 0 5 1
; A3 =
2
6
6
6
6
4
2 1 1=2 0 0
0 0 3 0
p
2
0 0 0 0 5
0 0 0 0 0
0 0 0 0 0
3
7
7
7
7
5
.
De…nição 17. O método de resolver sistemas lineares que consiste em aplicar operações
elementares às linhas da matriz aumentada do respectivo sistema de modo a que essa matriz
…que em escada de linhas, chama-se método de eliminação de Gauss.
Exemplo 10. O sistema de equações lineares de variáveis reais x; y e z
8
<
:
x + z = 3
x + 2y + 2z = 6
3y + 3z = 6
é equivalente a
2
4
1 0 1
1 2 2
0 3 3
3
5
2
4
x
y
z
3
5 =
2
4
3
6
6
3
5 .
Considere-se então a matriz aumentada e o consequente método de eliminação de Gauss:
2
4
1 0 1 j 3
1 2 2 j 6
0 3 3 j 6
3
5 !
L1+L2!L2
2
4
1 0 1 j 3
0 2 1 j 3
0 3 3 j 6
3
5 !3
2
L2+L3!L3
2
4
1 0 1 j 3
0 2 1 j 3
0 0 3
2
j 3
2
3
5 .
14](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-14-320.jpg)

![!
L2+L3!L3
2
4
1 2 1 j 3
0 1 2 j 1
0 0 (a 2) (a + 2) j a 2
3
5 .
Se a = 2, então o sistema é possível e indeterminado:
x + 2y + z = 3
y 2z = 1
,
x = 3z + 1
y = 2z + 1,
a incógnita z é livre, as incógnitas x e y são não livres e a solução geral do sistema é
8
<
:
2
4
3t + 1
2t + 1
t
3
5 : t 2 R
9
=
;
isto é, o conjunto solução é dado por: f(3t + 1; 2t + 1; t) : t 2 Rg.
Assim, se a = 2, o sistema tem in…nitas soluções e diz-se possível e indeterminado.
Se a = 2, o sistema não tem solução e diz-se impossível.
Se a 6= 2 e a 6= 2, o sistema tem a solução única a+5
a+2
; a
a+2
; 1
a+2
e diz-se possível
e determinado.
Observação 7. (Como inverter matrizes invertíveis do tipo n n). Seja A uma
matriz do tipo n n e consideremos a equação AX = B. Se A fôr invertível temos
AX = B , X = A 1
B, isto é, AX = IB , IX = A 1
B.
Assim, para determinar a inversa de A, iremos transformar a matriz aumentada [A j I] na
matriz [I j A 1
], por meio de operações elementares aplicadas às linhas de [A j I]:
[A j I] !
:::
I j A 1
Este método tem o nome de método de eliminação de Gauss-Jordan e consistirá na
continuação do método de eliminação de Gauss agora aplicado a [matriz triangular superior j ],
efectuando-se as eliminações de baixo para cima de modo a obter-se [I j A 1
].
Exemplo 13. Vejamos que
2 1
1 2
1
=
2
3
1
3
1
3
2
3
: Tem-se
2 1 j 1 0
1 2 j 0 1
!1
2
L1+L2!L2
!1
2
L1+L2!L2
2 1 j 1 0
0 3
2
j 1
2
1
!2
3
L2+L1!L1
2 0 j 4
3
2
3
0 3
2
j 1
2
1
!2
3
L2!L2
1
2
L1!L1
1 0 j 2
3
1
3
0 1 j 1
3
2
3
.
Isto é
2 1
1 2
1
=
2
3
1
3
1
3
2
3
.
De facto
2 1
1 2
2
3
1
3
1
3
2
3
=
2
3
1
3
1
3
2
3
2 1
1 2
= I
16](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-16-320.jpg)
![Exemplo 14. (i) Seja A =
2
4
0 1 1
1 5
4
1
2
1 1
2
0
3
5. Tem-se
[A j I] =
2
4
0 1 1 j 1 0 0
1 5
4
1
2
j 0 1 0
1 1
2
0 j 0 0 1
3
5 !
:::
2
4
1 0 0 j 1 2 3
0 1 0 j 2 4 4
0 0 1 j 3 4 4
3
5 .
Logo, 2
4
0 1 1
1 5
4
1
2
1 1
2
0
3
5
1
=
2
4
1 2 3
2 4 4
3 4 4
3
5 :
Veri…que(!) que: AA 1
= I.
(ii) Seja A =
2
4
9 8 7
6 5 4
3 2 1
3
5. Tem-se
[A j I] =
2
4
9 8 7 j 1 0 0
6 5 4 j 0 1 0
3 2 1 j 0 0 1
3
5 !
:::
2
4
3 2 1 j 0 0 1
0 1 2 j 0 1 2
0 0 0 j 1 2 1
3
5
Logo, A não é invertível.
(iii) Sejam A =
1 2
3 4
B =
4 0
0 8
C =
0 1
8
1
4
0
. Determine-se X tal que
A I 2XT 1
B 1
= C:
Tem-se
A I 2XT 1
B 1
= C , I 2XT 1
= A 1
CB , I 2XT
= A 1
CB
1
,
, XT
=
1
2
I B 1
C 1
A , X =
1
2
I AT
CT 1
BT 1
,
, X =
1
2
1 0
0 1
1 3
2 4
0 1
4
1
8
0
1
4 0
0 8
1
!
, X =
1 1
2
2 1
2
:
De…nição 18. (Ver-se-á mais adiante a consistência desta de…nição.) Seja A uma matriz
em escada de linhas. Ao no
de colunas de A que não contêm pivots chama-se nulidade de A
e escreve-se nul A. Ao no
de pivots de A, isto é, ao no
de linhas não nulas de A, dá-se o nome
de característica de A e escreve-se car A. Se A fôr a matriz em escada de linhas obtida de
C através de operações elementares então diz-se que a característica de C é car A, tendo-se
car C = car A e diz-se que a nulidade de C é nul A, tendo-se nul C = nul A.
17](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-17-320.jpg)
![Exemplo 15. Considere-se as matrizes do exemplo 9. Pivot de A1: 4. Pivots de A2:
1; 5. Pivots de A3: 2; 3; 5. Tem-se: car A1 = 1, car A2 = 2 e car A3 = 3. Além disso:
nul A1 = 1, nul A2 = 2 e nul A3 = 2.
De…nição 19. Uma matriz A = (aij)n n diz-se não singular se após o método de
eliminação de Gauss esta fôr transformada numa matriz triangular superior cujas entradas
da diagonal principal sejam todas não nulas. Uma matriz A = (aij)n n diz-se singular se
após o método de eliminação de Gauss existir (pelo menos) uma linha nula na matriz obtida
de A.
Teorema 11. Seja A = (aij)n n. Tem-se
A é invertível , A é não singular , car A = n ,
, para todo o B o sistema AX = B tem uma única solução (X = A 1
B),
isto é,
A não é invertível , A é singular , car A < n ,
, existe pelo menos um B para o qual o sistema AX = B não tem solução.
Observação 8. Seja [A j B] a matriz aumentada associada a um sistema de equações
lineares com n incógnitas.
(i) Se car A = car [A j B] = n então o sistema é possível e determinado (tem uma
única solução).
(ii) Se car A = car [A j B] < n então o sistema é possível e indeterminado (tem um
no
in…nito de soluções).
(iii) Se car A < car [A j B] então o sistema é impossível (não tem solução).
(iv) As incógnitas livres (podem tomar valores arbitrários) do sistema são aquelas que
correspondem às colunas, que não contenham pivots, da matriz em escada de linhas obtida
de A através de operações elementares.
(v) As incógnitas não livres do sistema são aquelas que correspondem às colunas,
que contenham pivots, da matriz em escada de linhas obtida de A através de operações
elementares.
(vi) car A = no
de linhas não nulas da matriz em escada de linhas obtida de A =
= no
de pivots = no
de incógnitas não livres:
nul A = no
de incógnitas livres:
(vii) Seja A uma matriz do tipo m n. Então 0 car A min fm; ng e
car A + nul A = n:
18](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-18-320.jpg)








![19. Determine todas as matrizes reais 2 2 que comutam com a matriz
1 2
3 4
.
20. Existem 16 matrizes 2 2 só com 0 e 1 nas respectivas entradas. Quantas são in-
vertíveis?
21. Seja A 2 Mn n (R) tal que A2
+ 2A + 2I = 0:Veri…que que A é invertível e determine
a sua inversa.
22. Sejam A; B; X 2 Mn n (R) matrizes invertíveis tais que (AB)2
=
3 4
7 9
. Em cada
um dos seguintes casos, determine a matriz X que satisfaz a equação
(i) AXB + AB = 0 (ii) BXA A 1
B 1
= 0
23. Determine A 2 M2 2 (R) tal que 2I (3A 1
)
T
1
=
4 3
7 5
:
24. Determine (se existirem) as inversas das seguintes matrizes.
(i)
0 1
1 0
(ii)
1 0
0 1
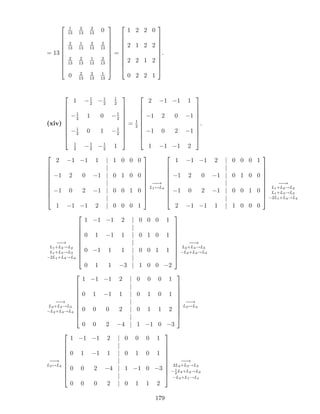
(iii) [1] (iv)
1 2
3 4
(v)
2
4
1 2 3
4 5 6
7 8 9
3
5 (vi)
2
4
1 2 3
0 1 2
0 0 1
3
5 (vii)
1
3
2
4
2 2 1
1 2 2
2 1 2
3
5
(viii)
2
4
1 0 2
0 3 0
4 0 5
3
5 (ix)
2
4
1 2 1
4 0 6
1 8 1
3
5 (x)
cos sen
sen cos
(xi)
2
6
6
4
k 0 0 0
1 k 0 0
0 1 k 0
0 0 1 k
3
7
7
5, com k 6= 0 (xii)
2
6
6
4
0 0 0 k1
0 0 k2 0
0 k3 0 0
k4 0 0 0
3
7
7
5, com k1; k2; k3; k4 6= 0
(xiii)
2
6
6
6
6
6
6
6
6
4
5
13
2
13
2
13
8
13
2
13
7
13
6
13
2
13
2
13
6
13
7
13
2
13
8
13
2
13
2
13
5
13
3
7
7
7
7
7
7
7
7
5
(xiv)
2
6
6
6
6
6
6
6
6
4
1 1
2
1
2
1
2
1
2
1 0 1
2
1
2
0 1 1
2
1
2
1
2
1
2
1
3
7
7
7
7
7
7
7
7
5
25. (i) Seja A 2 Mn n (R) tal que
Ak
= 0
para algum k 2 Nn f1g. Veri…que que
(I A) 1
= I + A + ::: + Ak 1
(ii) Calcule
2
4
1 1 0
0 1 1
0 0 1
3
5
1
:
27](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-27-320.jpg)







![Exemplo 21. (i)
1 1
2 2
= 1( 2) ( 1)2 = 0:
(ii)
1 2 1
3 1 2
2 1 3
= 1( 1)( 3) + 3 + 8 1( 1)2 6( 3) 2 = 32:
De…nição 26. Seja A = (aij) uma matriz do tipo n n, com n > 1. Seja Aij a matriz
do tipo (n 1) (n 1) que se obtem de A suprimindo a linha i e a coluna j de A. Chama-se
a Aij o menor-ij da matriz A.
Teorema 18. (Fórmula de Laplace.) Seja A uma matriz do tipo n n, com n > 1.
Tem-se
det A =
nX
j=1
aij( 1)i+j
det Aij, com i 2 f1; :::; ng …xo:
Observação 13. Seja A uma matriz do tipo n n, com n > 1. Tem-se
det A =
nX
i=1
aij( 1)i+j
det Aij, com j 2 f1; :::; ng …xo:
Exemplo 22.
1 0 2 3
2 1 1 4
0 1 0 2
1 0 2 3
= ( 1)( 1)3+2
1 2 3
2 1 4
1 2 3
+ ( 2)( 1)3+4
1 0 2
2 1 1
1 0 2
=
= ( 1)( 3) + ( 2)4 + 2( 2)3 ( 1)3 ( 2)2( 3) 4( 2) + 2 [( 2) ( 2)] = 18
Teorema 19. Sejam A e B matrizes do tipo n n. Seja um escalar.
(i) det AT
= det A.
(ii) Se A fôr uma matriz diagonal, triangular superior ou triangular inferior então o
determinante de A é igual ao produto dos elementos da diagonal principal de A.
(iii) Se A tiver uma linha (ou coluna) nula então det A = 0.
(iv) Se B fôr obtida de A trocando duas linhas (ou colunas) de A então det B = det A.
35](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-35-320.jpg)























![Considerando a matriz cujas colunas são os vectores de S, tem-se
2
4
1 0 1 1
0 1 1 1
1 a b 1
3
5 !
L1+L3!L3
2
4
1 0 1 1
0 1 1 1
0 a b 1 0
3
5 !
aL2+L3!L3
2
4
1 0 1 1
0 1 1 1
0 0 b a 1 a
3
5 .
Logo, Sa;b não gera R3
se e só se b a 1 = 0 e a = 0, isto é, se e só se a = 0 e b = 1.
Teorema 36. (i) Seja A 2 Mm n(R). As colunas de A geram Rm
se e só se car A = m.
(ii) Seja A 2 Mm n(R). As colunas de A são linearmente independentes se e só se
car A = n.
(iii) Seja A 2 Mn n(R). A matriz A é invertível se e só se as colunas de A (ou as linhas
de A) formarem uma base de Rn
. No caso de A ser invertível tem-se
C(A) = L(A) = Rn
.
Observação 29. Seja A 2 Mm n(R) e considere o sistema de equações lineares Au = b.
(i) O sistema Au = b é impossível (não tem solução) se e só se b =2 C(A), isto é, se e só
se car A < car [A j b].
(ii) O sistema Au = b é possível e indeterminado (tem um no
in…nito de soluções) se
e só se b 2 C(A) e as colunas de A forem linearmente dependentes, isto é, se e só se car A =
car [A j b] < n, isto é, se e só se car A = car [A j b] e nul A 6= 0.
(iii) O sistema Au = b é possível e determinado (tem uma única solução) se e só
se b 2 C(A) e as colunas de A forem linearmente independentes, isto é, se e só se car A =
car [A j b] = n, isto é, se e só se car A = car [A j b] e nul A = 0.
Observação 30. Seja A 2 Mm n(R) e considere o sistema de equações lineares Au = b.
(i) Existência de solução: Se m n então o sistema Au = b tem pelo menos uma
solução u para cada b 2 Rm
se e só se
car A = m:
(ii) Unicidade de solução: Se m n então o sistema Au = b tem no máximo uma
solução u para cada b 2 Rm
se e só se car A = n, isto é, se e só se
nul A = 0:
(iii) Existência e unicidade de solução: Se m = n então o sistema Au = b tem
solução única u para cada b 2 Rm
se e só se A fôr invertível.
59](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-59-320.jpg)








![V = L (f(2; 5; 4; 1); (0; 9; 6; 1); ( 4; 1; 2; 1)g) em R4
:
Neste alínea (viii) mostre que U = V .
(ix) Seja U o subespaço de R5
gerado por
f(1; 1; 1; 2; 0); (1; 2; 2; 0; 3); (1; 1; 2; 2; 1)g .
Seja V o subespaço de R5
gerado por
f(1; 2; 3; 0; 2); (1; 1; 3; 2; 4); (1; 1; 2; 2; 5)g .
Comece por escrever U e V como soluções de sistemas de equações lineares homogéneas.
(x) Sejam U e V subespaços de R4
gerados respectivamente por F e por G, com
F = f(1; 0; 1; 0); (0; 1; 1; 1); (1; 0; 0; 2) ; (0; 0; 1; 2)g ;
G = f(1; 1; 1; 1); (1; 2; 0; 1); (0; 0; 1; 1)g .
37. Seja A =
2
6
6
6
6
4
1 1 0 2 1
0 0 2 4 0
2 2 1 2 1
1 1 2 2 1
0 0 0 0 0
3
7
7
7
7
5
:
(i) Calcule a nulidade e a característica de A:
(ii) Determine bases para o espaço das colunas de A e para o núcleo de A:
(iii) Usando a alínea anterior, determine a solução geral do sistema de equações lineares
homogéneo Au = 0.
(iv) Resolva o sistema de equações Au = b, com b = (1; 0; 2; 1; 0): Note que b é igual à
1a
coluna de A e use esse facto de modo a encontrar uma solução particular de Au = b.
38. Utilize a informação da seguinte tabela para, em cada caso, determinar a dimensão do
espaço gerado pelas linhas de A, do espaço gerado pelas colunas de A, do núcleo de
A e do núcleo de AT
. Diga tambem se o correspondente sistema de equações lineares
não homogéneo AX = B é possível, determinando para esses casos, o número de
parâmetros que entram na solução geral de AX = B.
A 3 3 3 3 3 3 5 9 9 5 4 4 6 2
car A 3 2 1 2 2 0 2
car [A j B] 3 3 1 2 3 0 2
39. Construa uma matriz cujo núcleo seja gerado pelo vector (2; 0; 1).
40. Existe alguma matriz cujo espaço das linhas contém o vector (1; 1; 1) e cujo núcleo
contém (1; 0; 0)?
41. Quais são as matrizes do tipo 3 3 cujo núcleo tem dimensão 3?
42. Seja A 2 Mm n(R) tal que C(A) = N(A). Prove que A 2 Mn n(R) com n par. Dê
um exemplo para n = 4.
68](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-68-320.jpg)






![(viii) Seja T : C1
(R) ! C (R) de…nida por
T (f) = f0
;
onde C1
(R) é o espaço linear de todas as funções reais com primeira derivada contínua em R
e C (R) é o espaço linear de todas as funções reais contínuas em R. T é uma transformação
linear.
(ix) Seja a 2 R (…xo). Seja T : C1
(R) ! R de…nida por
T (f) = f0
(a) .
T é uma transformação linear.
(x) Seja n 2 N. Seja T : Cn
(R) ! C (R) de…nida por
T (f) = f(n)
;
onde f(n)
é a derivada de ordem n de f, Cn
(R) é o espaço linear de todas as funções reais
com derivada de ordem n contínua em R e C (R) é o espaço linear de todas as funções reais
contínuas em R. T é uma transformação linear.
(xi) Seja T : C (R) ! C1
(R) de…nida por
T (f) =
Z x
0
f (t) dt:
T é uma transformação linear.
(xii) Seja T : C ([a; b]) ! R de…nida por
T (f) =
Z b
a
f (t) dt:
T é uma transformação linear.
(xiii) Seja T : Mn n(R) !Mn n(R) de…nida por
T (X) = XT
:
T é uma transformação linear.
(xiv) Seja T : Mn n(R) !Mn n(R) de…nida por
T (X) = AX;
com A 2 Mn n(R) …xa. T é uma transformação linear.
(xv) Seja
tr : Mn n(R) ! R
de…nida por
tr(A) = a11 + ::: + ann =
nX
i=1
aii,
75](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-75-320.jpg)

![(iv) Seja T : C1
(R) ! C (R) de…nida por
T (f) = f0
:
Tem-se
N(T) = ff : R ! R tal que f é constante em Rg e I(T) = C (R) :
(v) Seja T : C2
(R) ! C (R) de…nida por
T (f (t)) = f00
(t) + !2
f (t) ;
com ! 2 Rn f0g. Tem-se (pág. 72 de [1])
N(T) = L (fcos (!t) ; sen (!t)g) ;
onde fcos (!t) ; sen (!t)g é uma base de N(T). Observe-se que N(T) é precisamente a solução
geral da equação diferencial linear homogénea
f00
(t) + !2
f (t) = 0:
(vi) Seja T : C2
(R) ! C (R) de…nida por
T (f (t)) = f00
(t) !2
f (t) ;
com ! 2 Rn f0g. Tem-se (pág. 74 de [1])
N(T) = L e !t
; e!t
;
onde fe !t
; e!t
g é uma base de N(T). Note-se que N(T) é precisamente a solução geral da
equação diferencial linear homogénea
f00
(t) !2
f (t) = 0:
Teorema 42. Sejam U um espaço linear de dimensão …nita e T uma transformação
linear de…nida em U. Então, o subespaço I(T) tem dimensão …nita e
dim N(T) + dim I(T) = dim U.
De…nição 38. Sejam U e V espaços lineares e S; T : U ! V transformações lineares.
Seja um escalar. Sejam S + T; T : U ! V de…nidas por
(S + T) (u) = S(u) + T(u) e ( T)(u) = T(u),
para todo o u 2 U.
77](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-77-320.jpg)
























![(iv) A multiplicidade geométrica de cada valor próprio de A é igual à multiplicidade
algébrica desse valor próprio.
Observação 43. (i) Seja V um espaço linear tal que dim V = n. Seja A = M (T; B; B)
a matriz n n que representa a transformação linear T : V ! V em relação à base ordenada
B. No caso de haver uma base Bvp (ordenada) de V apenas constituída por vectores próprios
de T, então tem-se
M (T; Bvp; Bvp) = PAP 1
,
onde P 1
= SBvp!B, sendo deste modo M (T; Bvp; Bvp) a matriz diagonal cujas entradas da
diagonal principal são os valores próprios de A apresentados pela ordem dos vectores próprios
correspondentes na base Bvp. Assim, T é representada relativamente a uma base ordenada
por uma matriz diagonal, isto é, T é diagonalizável.
No caso de se ter V = Rn
e B = Bn
c (base canónica ordenada) as colunas da matriz
P 1
= SBvp!Bn
c
são os vectores próprios de A da base Bvp dispostos pela mesma ordem.
(ii) No caso de se ter D = PAP 1
, com P invertível e D matriz diagonal, tem-se, para
k 2 N,
Dk
= PAk
P 1
, ou seja, Ak
= P 1
Dk
P.
Exemplo 46. Nos exemplos que se seguem as matrizes A consideradas poderão ser vistas
como matrizes que representam transformações lineares T relativamente à base canónica (ou
outras) ordenada de R3
, tendo-se no caso da base canónica, para todo o v 2 R3
,
T(v) = Av.
Deste modo, os valores próprios e vectores próprios de T serão respectivamente os valores
próprios e vectores próprios de A.
(i) Uma matriz com valores próprios distintos.
A =
2
4
1 5 1
0 2 1
4 0 3
3
5 .
O polinómio característico é dado por
det(A I) =
1 5 1
0 2 1
4 0 3
=
= (1 ) ( 2 ) (3 ) 20 + 4 (2 + ) =
= (1 ) ( 2 ) (3 ) + 4 12 =
= (3 ) [( 1) ( + 2) 4] =
= (3 ) 2
+ 6 =
= (3 ) ( 2) ( + 3) .
Os valores próprios de A são os valores de para os quais det(A I) = 0. Logo, os valores
próprios de A são
1 = 3, 2 = 2 e 3 = 3.
102](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-102-320.jpg)



![O polinómio característico é dado por
det(A I) =
7 5 1
0 2 1
20 0 3
=
= (7 ) ( 2 ) (3 ) + 100 20 (2 + ) =
= (3 ) [(7 ) ( 2 ) + 20] =
= (3 ) 2
5 + 6 =
= (3 ) ( 3) ( 2) .
Os valores próprios de A são os valores de para os quais det(A I) = 0. Logo, os valores
próprios de A são
1 = 3 e 2 = 2.
Os vectores próprios de A associados ao valor próprio são os vectores não nulos v 2 R3
para os quais
(A I) v = 0,
isto é, são os vectores não nulos de N (A I).
Determinemos os vectores próprios de A associados ao valor próprio 1 = 3. Tem-se
N (A 1I) = N
0
@
2
4
4 5 1
0 5 1
20 0 0
3
5
1
A = L (f(0; 1; 5)g) .
Logo, o subespaço próprio E 1 é dado por
E 1 = N (A 1I) = L (f(0; 1; 5)g) .
Os vectores próprios de A associados ao valor próprio 1 = 3 são
v = (0; s; 5s) , com s 2 Rn f0g .
Determinemos os vectores próprios de A associados ao valor próprio 2 = 2. Tem-se
N (A 2I) = N
0
@
2
4
5 5 1
0 4 1
20 0 1
3
5
1
A = L (f(1; 5; 20)g) .
Logo, o subespaço próprio E 2 é dado por
E 2 = N (A 2I) = L (f(1; 5; 20)g) .
Os vectores próprios de A associados ao valor próprio 2 = 2 são
v = (s; 5s; 20s) , com s 2 Rn f0g .
Atendendo a que
dim E 1 + dim E 2 = 2 < 3,
não é possível ter uma base de R3
formada só por vectores próprios de A. Logo, a matriz
A não é diagonalizável, isto é, não existe uma matriz invertível P diagonalizante tal que a
matriz PAP 1
seja diagonal.
106](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-106-320.jpg)












![A matriz G é simétrica e o único valor próprio de G é 1 > 0.
(ii) Seja h; i : R2
R2
! R a aplicação de…nida por:
h( 1; 2) ; ( 1; 2)i = 2 1 1 + 3 2 2,
com ( 1; 2) ; ( 1; 2) 2 R2
. Esta aplicação não é um produto interno em R2
, uma vez que
h( 1; 2) ; ( 1; 2)i = 2 1 1 + 3 2 2 = 1 2 G 1
2
com
G =
2 0
0 3
.
A matriz G é simétrica, no entanto, os valores próprios de G: 2 e 3 não são ambos positivos.
(iii) O produto interno usual em Rn
é dado por:
h; i : Rn
Rn
! R
(u; v) ! hu; vi = uT
v,
onde uT
= u1 u2 : : : un e v =
2
6
6
6
4
v1
v2
...
vn
3
7
7
7
5
.
(iv) O produto interno usual em Cn
é dado por:
h; i : Cn
Cn
! C
(u; v) ! hu; vi = uH
v,
onde uH
= uT
= u1 u2 : : : un e v =
2
6
6
6
4
v1
v2
...
vn
3
7
7
7
5
.
(v) Um produto interno em Mm n (R).
h; i : Mm n (R) Mm n (R) ! R
(A; B) ! hA; Bi =
mX
i=1
nX
j=1
aijbij = tr AT
B .
(vi) Um produto interno em C ([a; b]).
h; i : C ([a; b]) C ([a; b]) ! R
(f; g) ! hf; gi =
Z b
a
f (x) g (x) dx.
119](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-119-320.jpg)















![Produto externo e produto misto
De…nição 56. Sejam u = (u1; u2; u3) ; v = (v1; v2; v3) 2 R3
. Então o produto externo
(vectorial) de u por v, denotado por u v, é o vector de R3
de…nido por
u v = (u2v3 u3v2; u3v1 u1v3; u1v2 u2v1) ,
isto é,
u v =
u2 u3
v2 v3
;
u1 u3
v1 v3
;
u1 u2
v1 v2
=
=
u2 u3
v2 v3
e1
u1 u3
v1 v3
e2 +
u1 u2
v1 v2
e3 =
e1 e2 e3
u1 u2 u3
v1 v2 v3
,
onde fe1; e2; e3g é a base canónica de R3
.
Observação 54. Sejam u; v; w 2 R3
e 2 R. Então, tem-se:
(i) e1 e2 = e3
(ii) e2 e3 = e1
(iii) e3 e1 = e2
(iv) u v = (v u)
(v) u (v + w) = u v + u w
(vi) (u + v) w = u w + v w
(vii) (u v) = ( u) v = u ( v)
(viii) u 0 = 0 u = 0
(ix) u u = 0
(x) Se u e v forem linearmente dependentes então u v = 0
(xi) u (v w) = hu; wi v hu; vi w
(xii) (u v) w = hw; ui v hw; vi u
(xiii) ku vk2
+ hu; vi2
= kuk2
kvk2
(xiv) u (v w) + v (w u) + w (u v) = 0
Teorema 75. Considere-se R3
com o produto interno usual. Sejam u = (u1; u2; u3) ; v =
(v1; v2; v3) 2 R3
n f0g e seja 2 [0; ] o ângulo formado por u e v. Então tem-se:
135](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-135-320.jpg)
![(i) ku vk = kuk kvk sen .
(ii) A área do paralelogramo de lados adjacentes u e v é dada por:
A = ku vk .
Dem. (i) Como 2 [0; ], tem-se sen =
p
1 cos2 e deste modo,
kuk kvk sen =
= kuk kvk
p
1 cos2 = kuk kvk
s
1
hu; vi2
kuk2
kvk2 =
q
kuk2
kvk2
hu; vi2
=
=
q
(u2
1 + u2
2 + u2
3) (v2
1 + v2
2 + v2
3) (u1v1 + u2v2 + u3v3)2
=
=
q
(u2v3 u3v2)2
+ (u3v1 u1v3)2
+ (u1v2 u2v1)2
=
= k(u2v3 u3v2; u3v1 u1v3; u1v2 u2v1)k = ku vk .
(ii) A = (base) (altura) = kuk kvk sen .
De…nição 57. Considere-se R3
com o produto interno usual. Sejam u = (u1; u2; u3) ; v =
(v1; v2; v3) ; w = (w1; w2; w3) 2 R3
. À expressão
hu; v wi
chama-se produto misto de u; v e w.
Observação 55. Considere-se R3
com o produto interno usual. Sejam u = (u1; u2; u3) ; v =
(v1; v2; v3) ; w = (w1; w2; w3) 2 R3
. Então, tem-se:
(i)
hu; v wi =
u1 u2 u3
v1 v2 v3
w1 w2 w3
(ii) Sendo o ângulo formado por u e v w, o volume do paralelepípedo com um vértice
e arestas u; v; w com origem em (0; 0; 0), é dado por
V = kv wk
| {z }
área da face determinada por v e w
kuk jcos j
| {z }
altura
=
= kv wk kuk
jhu; v wij
kuk kv wk
= jhu; v wij = det
0
@
2
4
u1 u2 u3
v1 v2 v3
w1 w2 w3
3
5
1
A
(iii) hu; u vi = 0
(iv) hv; u vi = 0
(v) hu; v wi = hu v; wi.
136](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-136-320.jpg)















![Resolução da 1a
Ficha de exercícios para as aulas de problemas
1. (ii)
1 1
0 1
1000
=
1 1
0 1
2
!500
= I500
= I
(iv)
0 1
1 0
222
+
0 1
1 0
220
=
0 1
1 0
220
0 1
1 0
2
+ I
!
=
=
0 1
1 0
220
0 0
0 0
=
0 0
0 0
(xi) se ad bc 6= 0,
a b
c d
1
ad bc
d b
c a
=
1
ad bc
ad bc 0
0 ad bc
= I
2. (i) 1
3
2
3
= [ 2 1] (ii) Não é possível.
(iii)
2
4
3
2
2
1 1
3
5
2
4
1
3
2 4
3
p
5 1
2
3
5 =
2
4
11
2
3 2
p
5 5
8
3
2
p
5 7
2
3
5
(iv) 2
1 0
3 1
2
1
3
0 6
2 3
=
2 2
20
3
2
(v) Não é possível. (vi) Não é possível.
(vii)
p
2
3
4 1
2
2 =
2
4
4
p
2 1
2
p
2 2
p
2
12 3
2
6
3
5
viii)
0
@
2
4
2
1
4
1
3
5 2
p
2 3
1
A
T
=
2
4
4
p
2 1
2
p
2 2
p
2
12 3
2
6
3
5
(ix)
0
B
B
B
B
@
2
2
4
1
3
0 1
2
1
3
1
2
1
3
5
T 2
4
1 0 1
2
1
3
1
2
1
3
5
2
6
6
6
6
4
8
9
1
3
1
1
3
1
2
1
5
3
1 5
2
3
7
7
7
7
5
1
C
C
C
C
A
T
=
2
4
0 0 0
0 0 0
0 0 0
3
5
(x)
2
4
1 1
2
0 2
0 1 1
4
0
6 2 5 1
3
5
T 2
4
1 0
2 4
1
3
3
3
5 =
2
6
6
6
6
6
6
6
6
4
1 18
5
6
10
7
6
16
7
3
3
3
7
7
7
7
7
7
7
7
5
153](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-153-320.jpg)










![Logo, o sistema não tem solução (é impossível). S = ?.
15. (a) Sejam A =
2
4
1 1
1 1
1 1
3
5 e B =
2
4
1
1
1
3
5.
[A j B] =
2
4
1 1 j 1
1 1 j 1
1 1 j 1
3
5 !
L1$L3
2
4
1 1 j 1
1 1 j 1
1 1 j 1
3
5 !
L1+L2!L2
L1+L3!L3
!
L1+L2!L2
L1+L3!L3
2
4
1 1 j 1
0 1 1 j 0
0 1 1 2
j 1
3
5 !
L2+L3!L3
2
4
1 1 j 1
0 1 1 j 0
0 0 (1 ) ( + 2) j 1
3
5.
Se = 1 então car A = car [A j B] = 1 < 3 = no
de incógnitas do sistema. Logo o
sistema é possível e indeterminado, tendo-se x + y + z = 1. A solução geral deste sistema é
então dada por
S1 = f(1 s t; s; t) : s; t 2 Rg :
Se = 2 então car A
| {z }
=2
< car [A j B]
| {z }
=3
. Logo, o sistema não tem solução (é impossível).
S 2 = ?.
Se 6= 1 e 6= 2 então car A = car [A j B] = 3 = no
de incógnitas do sistema. Logo
o sistema é possível e determinado, tendo-se
8
<
:
x + y + z = 1
( 1) y + (1 ) z = 0
(1 ) ( + 2) z = 1
,
8
<
:
x = 1= ( + 2)
y = 1= ( + 2)
z = 1= ( + 2) .
A solução geral do sistema é então dada por S =
1
+ 2
;
1
+ 2
;
1
+ 2
.
(b) Sejam A =
1 2
2 8
e B =
1
3
.
[A j B] =
1 2 j 1
2 8 j 3
!
2L1+L2!L2
1 2 j 1
0 4 8 2 j 1
.
164](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-164-320.jpg)
![Se 6= 4 então car A = car [A j B] = 2 < 3 = no
de incógnitas do sistema. Logo o
sistema é possível e indeterminado, tendo-se
x + 2y + z = 1
( 4) y + (8 2 ) z = 1
,
8
>>><
>>>:
x = 1
2
4
( + 4) z
y =
1
4
+ 2z.
A solução geral deste sistema é então dada por
S = 1
2
4
( + 4) s;
1
4
+ 2s; s : s 2 R :
Se = 4 então car A
| {z }
=1
< car [A j B]
| {z }
=2
. Logo, o sistema não tem solução (é impossível).
S4 = ?.
(c) Sejam A =
2
4
1 1
3 4 2
2 3 1
3
5 e B =
2
4
2
1
3
5. [A j B ] =
2
4
1 1 j 2
3 4 2 j
2 3 1 j 1
3
5 !
3L1+L2!L2
2L1+L3!L3
!
3L1+L2!L2
2L1+L3!L3
2
4
1 1 j 2
0 1 2 3 j 6
0 1 1 2 j 3
3
5 !
L2+L3!L3
2
4
1 1 j 2
0 1 2 3 j 6
0 0 3 + j 3
3
5.
Se = 3 então car A = car [A j B ] = 2 < 3 = no
de incógnitas do sistema. Logo o
sistema é possível e indeterminado, tendo-se
x + y + 3z = 2
y 7z = 3
,
8
<
:
x = 5 10z
y = 3 + 7z.
A solução geral deste sistema é então dada por
S3 = f(8 + (2 4 ) s; 6 + (3 2) s; s) : s 2 Rg :
Se 6= 3 então car A = car [A j B ] = 3 = no
de incógnitas do sistema. Logo o sistema
é possível e determinado, tendo-se
8
<
:
x + y + z = 2
y + (2 3 ) z = 6
( 3 + ) z = 3
,
8
<
:
x = 6 + 3
y = 4 2
z = 1.
165](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-165-320.jpg)
![A solução geral do sistema é então dada por
S = f(6 + 3 ; 4 2 ; 1)g :
(d) Sejam A =
2
4
1 1
1 1
1 1
3
5 e B =
2
4
1
2
3
5. [A j B ] =
2
4
1 1 j 1
1 1 j
1 1 j 2
3
5 !
L1$L3
!
L1$L3
2
4
1 1 j 2
1 1 j
1 1 j 1
3
5 !
L1+L2!L2
L1+L3!L3
2
4
1 1 j 2
0 1 1 j 2
0 1 1 2
j 1 3
3
5 !
L2+L3!L3
!
L2+L3!L3
2
4
1 1 j 2
0 1 1 j (1 )
0 0 (1 ) ( + 2) j (1 + ) (1 2
)
3
5.
Se = 1 então car A = car [A j B ] = 1 < 3 = no
de incógnitas do sistema. Logo o
sistema é possível e indeterminado, tendo-se x + y + z = 1. A solução geral deste sistema é
então dada por S1 = f(1 s t; s; t) : s; t 2 Rg.
Se = 2 então car A
| {z }
=2
< car [A j B ]
| {z }
=3
. O sistema não tem solução (é impossível).
S 2 = ?.
Se 6= 1 e 6= 2 então car A = car [A j B ] = 3 = no
de incógnitas do sistema. Logo
o sistema é possível e determinado, tendo-se
8
<
:
x + y + z = 2
( 1) y + (1 ) z = (1 )
(1 ) ( + 2) z = (1 + ) (1 2
)
,
8
<
:
x = ( + 1) = ( + 2)
y = 1= ( + 2)
z = (1 + )2
= ( + 2) .
A solução geral do sistema é então dada por
S =
(
+ 1
+ 2
;
1
+ 2
;
(1 + )2
+ 2
!)
:
(e)
8
<
:
x + y + z = 1
2x + y 2 z =
x + y + z = 1 + 2
Sejam A =
2
4
1 1
2 2
1
3
5 e B =
2
4
1
1 + 2
3
5.
166](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-166-320.jpg)
![[A j B] =
2
4
1 1 j 1
2 2 j
1 j 1 + 2
3
5 !
2L1+L2!L2
L1+L3!L3
2
4
1 1 j 1
0 + 2 0 j + 2
0 0 (1 ) (1 + ) j 1 +
3
5 :
Se = 1 então car A = car [A j B] = 2 < 3 = no
de incógnitas do sistema. Logo o
sistema é possível e indeterminado, tendo-se
x + y + z = 1
3y = 3:
,
x = z
y = 1:
A solução geral deste sistema é então dada por
S1 = f(s; 1; s) : s 2 Rg :
Se = 2 então então car A = car [A j B] = 2 < 3 = no
de incógnitas do sistema.
Logo o sistema é possível e indeterminado, tendo-se
x + y 2z = 1
3z = 3:
,
x = y 3
z = 1:
A solução geral deste sistema é então dada por
S 2 = f(s 3; s; 1) : s 2 Rg :
Se = 1 então car A
| {z }
=2
< car [A j B]
| {z }
=3
. Logo, o sistema não tem solução (é impossível).
S 1 = ?:
Se 6= 1 e 6= 1 e 6= 2 então car A = car [A j B] = 3 = no
de incógnitas do sistema.
Logo o sistema é possível e determinado, tendo-se
8
<
:
x + y + z = 1
( + 2) y = + 2
(1 ) (1 + ) z = 1 +
,
8
<
:
x = = ( + 1)
y = 1
z = 1= ( + 1) .
A solução geral do sistema é então dada por
S =
+ 1
; 1;
1
+ 1
:
16. (a) Sejam A =
2
4
1 4 3
2 7 2
1 5
3
5 e B =
2
4
10
10
3
5.
[A j B ] =
2
4
1 4 3 j 10
2 7 2 j 10
1 5 j
3
5 !
2L1+L2!L2
L1+L3!L3
167](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-167-320.jpg)
![!
2L1+L2!L2
L1+L3!L3
2
4
1 4 3 j 10
0 1 8 j 10
0 1 3 j 10
3
5 !
L2+L3!L3
2
4
1 4 3 j 10
0 1 8 j 10
0 0 11 j 20
3
5.
Se = 11 e = 20 então car A = car [A j B ] = 2 < 3 = no
de incógnitas do sistema.
Logo o sistema é possível e indeterminado, tendo-se
x + 4y + 3z = 10
y 8z = 10
,
x = 30 + 29z
y = 10 8z.
A solução geral deste sistema é então dada por S ; = f( 30 + 29s; 10 8s; s) : s 2 Rg.
Se = 11 e 6= 20 então car A
| {z }
=2
< car [A j B ]
| {z }
=3
. Logo, o sistema não tem solução (é
impossível). S ; = ?.
Se 6= 11 então car A = car [A j B ] = 3 = no
de incógnitas do sistema. Logo o
sistema é possível e determinado, tendo-se
8
<
:
x + 4y + 3z = 10
y 8z = 10
( 11) z = 20
,
8
<
:
x = (30 29 + 250) = ( 11)
y = (10 8 + 50) = ( 11)
z = ( 20) = ( 11) .
A solução geral do sistema é então dada por
S ; =
30 29 + 250
11
;
10 8 + 50
11
;
20
11
:
(b) Sejam A =
2
6
6
4
0 0 2
1 1 1 3
2 2 1 1
1 1 3 14
3
7
7
5 e B =
2
6
6
4
1
2
4
3
7
7
5 : [A j B ] =
2
6
6
4
0 0 2 j
1 1 1 3 j 1
2 2 1 1 j 2
1 1 3 14 j 4
3
7
7
5 !
L1$L3
!
L1$L3
2
6
6
4
2 2 1 1 j 2
1 1 1 3 j 1
0 0 2 j
1 1 3 14 j 4
3
7
7
5 !
L1$L2
2
6
6
4
1 1 1 3 j 1
2 2 1 1 j 2
0 0 2 j
1 1 3 14 j 4
3
7
7
5 !
2L1+L2!L2
L1+L4!L4
!
2L1+L2!L2
L1+L4!L4
2
6
6
4
1 1 1 3 j 1
0 0 1 5 j 0
0 0 2 j
0 0 2 11 j 3
3
7
7
5 !
2L2+L3!L3
2L2+L4!L4
2
6
6
4
1 1 1 3 j 1
0 0 1 5 j 0
0 0 0 10 j
0 0 0 1 j 3
3
7
7
5 !
L1$L2
168](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-168-320.jpg)
![!
L1$L2
2
6
6
4
1 1 1 3 j 1
0 0 1 5 j 0
0 0 0 1 j 3
0 0 0 10 j
3
7
7
5 !
( 10)L3+L4!L4
2
6
6
4
1 1 1 3 j 1
0 0 1 5 j 0
0 0 0 1 j 3
0 0 0 0 j 3 ( 10) +
3
7
7
5.
Se = 3 ( 10) então car A = car [A j B ] = 3 < 4 = no
de incógnitas do sistema.
Logo o sistema é possível e indeterminado, tendo-se
8
<
:
x + y + z + 3w = 1
z 5w = 0
w = 3
,
8
<
:
x = 7 y
z = 15
w = 3.
:
A solução geral deste sistema é então dada por S ; = f(7 s; s; 15; 3) : s 2 Rg.
Se 6= 3 ( 10) então car A
| {z }
=3
< car [A j B ]
| {z }
=4
. Logo, o sistema não tem solução (é
impossível). S ; = ?.
(c) Sejam A =
2
4
1 1
1 2 2 1
1 1 1 + 1
3
5 e B =
2
4
0
1
3
5 :
[A j B ] =
2
4
1 1 j 0
1 2 2 1 j 1
1 1 1 + 1 j
3
5 !
L1$L3
!
L1$L3
2
4
1 1 1 + 1 j
1 2 2 1 j 1
1 1 j 0
3
5 !
L1+L2!L2
L1+L3!L3
!
L1+L2!L2
L1+L3!L3
2
4
1 1 1 + 1 j
0 1 1 j 1
0 + 1 1 2
j
3
5 !
( +1)L2+L3!L3
!
( +1)L2+L3!L3
2
4
1 1 1 + 1 j
0 1 1 j 1
0 0 0 ( 2 1) j 2 + 1
3
5.
Se 6= 0 e 6=
1
2
então car A = car [A j B ] = 3 < 4 = no
de incógnitas do sistema.
Logo o sistema é possível e indeterminado, tendo-se
8
<
:
x y + z + ( + 1) w =
y + z w = 1
( 2 1) w = + 1 + ( 2 1)
,
8
><
>:
x = +1
2 +1
1 ( +1)2
( 2 1)
y = z +1
2 +1
1
w = +1
( 2 1)
+ .
169](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-169-320.jpg)
![A solução geral do sistema é então dada por
S ; =
(
+ 1
2 + 1
1
( + 1)2
( 2 1)
; s
+ 1
2 + 1
1; s;
+ 1
( 2 1)
+
!)
:
Se = 0 e = 1 então car A = car [A j B ] = 2 < 4 = no
de incógnitas do sistema.
Logo o sistema é possível e indeterminado, tendo-se
x y + z + w = 1
y + z = 0
,
x = 1 w
y = z.
A solução geral deste sistema é então dada por S ; = f(1 s; t; t; s) : s; t 2 Rg.
Se ( = 0 e 6= 1) ou =
1
2
então car A
| {z }
=2
< car [A j B ]
| {z }
=3
. Logo, o sistema não tem
solução (é impossível). S ; = ?.
17. (a) Sejam A =
2
4
1 2 3
3 1 2
1 5 8
3
5 e Ba;b;c =
2
4
a
b
c
3
5 :
[A j Ba;b;c] =
2
4
1 2 3 j a
3 1 2 j b
1 5 8 j c
3
5 !
3L1+L2!L2
L1+L3!L3
!
3L1+L2!L2
L1+L3!L3
2
4
1 2 3 j a
0 7 11 j b 3a
0 7 11 j c a
3
5 !
L2+L3!L3
2
4
1 2 3 j a
0 7 11 j b 3a
0 0 0 j c b + 2a
3
5.
Para que haja solução é necessário que car A = car [A j Ba;b;c], isto é, é necessário que
c b + 2a = 0:
(b) Sejam A =
2
4
1 2 4
2 3 1
3 1 2
3
5 e Ba;b;c =
2
4
a
b
c
3
5 :
[A j Ba;b;c] =
2
4
1 2 4 j a
2 3 1 j b
3 1 2 j c
3
5 !
2L1+L2!L2
3L1+L3!L3
170](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-170-320.jpg)
![!
2L1+L2!L2
3L1+L3!L3
2
4
1 2 4 j a
0 7 9 j b 2a
0 7 10 j c 3a
3
5 !
L2+L3!L3
2
4
1 2 4 j a
0 7 9 j b 2a
0 0 1 j c b a
3
5.
Como car A = car [A j Ba;b;c], este sistema tem solução para quaisquer valores de a; b; c.
18. (a) Sejam x = 1 + t e y = 1 t. Logo
x + y = 2:
(b) Sejam x = t, y = 1 2t e z = 1. Tem-se então o seguinte sistema:
8
<
:
2x + y = 1
z = 1.
(c) Sejam x = 3t, y = 2t e z = t. Tem-se então o seguinte sistema:
8
<
:
x 3z = 0
y 2z = 0.
(d) Sejam x = 3t s, y = t + 2s 1 e z = s 2t + 1. Logo s = 3t x e assim
y = t + 2 (3t x) 1 = 7t 2x 1 , t =
y + 2x + 1
7
:
Deste modo:
s = 3
y + 2x + 1
7
x =
3y x + 3
7
Com
s =
3y x + 3
7
e t =
y + 2x + 1
7
Tem-se então a seguinte equação linear:
z = s 2t + 1 =
3y x + 3
7
2
y + 2x + 1
7
+ 1.
Isto é:
5x y + 7z = 8.
171](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-171-320.jpg)


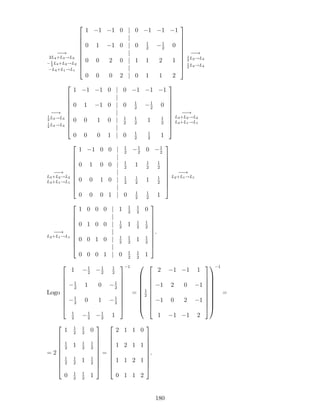
![(ii)
1 0
0 1
1
=
1 0
0 1
(iii) [1] 1
= [1]
(iv)
1 2 j 1 0
3 4 j 0 1
!
3L1+L2!L2
1 2 j 1 0
0 2 j 3 1
!
L2+L1!L1
!
L2+L1!L1
1 0 j 2 1
0 2 j 3 1
!1
2
L2!L2
1 0 j 2 1
0 1 j 3
2
1
2
.
Logo
1 2
3 4
1
=
2 1
3
2
1
2
.
(v)
2
4
1 2 3 j 1 0 0
4 5 6 j 0 1 0
7 8 9 j 0 0 1
3
5 !
4L1+L2!L2
7L1+L3!L3
2
4
1 2 3 j 1 0 0
0 3 6 j 4 1 0
0 6 12 j 7 0 1
3
5 !
2L2+L3!L3
!
2L2+L3!L3
2
4
1 2 3 j 1 0 0
0 3 6 j 4 1 0
0 0 0 j 1 2 1
3
5.
Logo,
2
4
1 2 3
4 5 6
7 8 9
3
5 é singular e como tal não é invertível.
Nas alíneas (vi) e (vii) só se apresentam as soluções:
(vi)
2
4
1 2 3
0 1 2
0 0 1
3
5
1
=
2
4
1 2 1
0 1 2
0 0 1
3
5 (vii)
0
@1
3
2
4
2 2 1
1 2 2
2 1 2
3
5
1
A
1
=
2
4
2
3
1
3
2
3
2
3
2
3
1
3
1
3
2
3
2
3
3
5
(viii)
2
4
1 0 2 j 1 0 0
0 3 0 j 0 1 0
4 0 5 j 0 0 1
3
5 !
4L1+L3!L3
2
4
1 0 2 j 1 0 0
0 3 0 j 0 1 0
0 0 3 j 4 0 1
3
5 !2
3
L3+L1!L1
!2
3
L3+L1!L1
2
4
1 0 0 j 5
3
0 2
3
0 3 0 j 0 1 0
0 0 3 j 4 0 1
3
5 !1
3
L2!L2
1
3
L3!L3
2
4
1 0 0 j 5
3
0 2
3
0 1 0 j 0 1
3
0
0 0 1 j 4
3
0 1
3
3
5.
Logo
2
4
1 0 2
0 3 0
4 0 5
3
5
1
=
2
4
5
3
0 2
3
0 1
3
0
4
3
0 1
3
3
5.
174](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-174-320.jpg)




![(b) A1 j I =
=
2
6
6
4
1 0 1 2 j 1 0 0 0
2 1 1 4 j 0 1 0 0
4 0 1 8 j 0 0 1 0
1 0 1 1 j 0 0 0 1
3
7
7
5 !
2L1+L2!L2
4L1+L3!L3
L1+L4!L4
2
6
6
4
1 0 1 2 j 1 0 0 0
0 1 1 0 j 2 1 0 0
0 0 3 0 j 4 0 1 0
0 0 0 1 j 1 0 0 1
3
7
7
5 !
2L4+L1!L1
1
3
L3+L1!L1
1
3
L3+L2!L2
!
2L4+L1!L1
1
3
L3+L1!L1
1
3
L3+L2!L2
2
6
6
4
1 0 0 0 j 7
3
0 1
3
2
0 1 0 0 j 2
3
1 1
3
0
0 0 3 0 j 4 0 1 0
0 0 0 1 j 1 0 0 1
3
7
7
5 !
L4!L4
1
3
L3!L3
2
6
6
4
1 0 0 0 j 7
3
0 1
3
2
0 1 0 0 j 2
3
1 1
3
0
0 0 1 0 j 4
3
0 1
3
0
0 0 0 1 j 1 0 0 1
3
7
7
5
Logo
(A1) 1
=
2
6
6
4
7
3
0 1
3
2
2
3
1 1
3
0
4
3
0 1
3
0
1 0 0 1
3
7
7
5 :
30. (a) Ba;b =
2
6
6
4
0 0 a 1
2 2 0 a
0 0 a b
3 0 6 0
3
7
7
5 !
L1$L2
2
6
6
4
2 2 0 a
0 0 a 1
0 0 a b
3 0 6 0
3
7
7
5 !
L2$L4
!
L2$L4
2
6
6
4
2 2 0 a
3 0 6 0
0 0 a b
0 0 a 1
3
7
7
5 !3
2
L1+L2!L2
L3+L4!L4
2
6
6
4
2 2 0 a
0 3 6 3
2
a
0 0 a b
0 0 0 1 b
3
7
7
5.
Se a = 0 ou ( a 6= 0 e b = 1) então car Ba;b = 3 e nul Ba;b = 1.
Se a 6= 0 e b 6= 1 então car Ba;b = 4 e nul Ba;b = 0.
(b) [B1;0 j I] =
2
6
6
4
0 0 1 1 j 1 0 0 0
2 2 0 1 j 0 1 0 0
0 0 1 0 j 0 0 1 0
3 0 6 0 j 0 0 0 1
3
7
7
5 !
L1$L4
2
6
6
4
3 0 6 0 j 0 0 0 1
2 2 0 1 j 0 1 0 0
0 0 1 0 j 0 0 1 0
0 0 1 1 j 1 0 0 0
3
7
7
5 !2
3
L1+L2!L2
L3+L4!L4
!2
3
L1+L2!L2
L3+L4!L4
2
6
6
4
3 0 6 0 j 0 0 0 1
0 2 4 1 j 0 1 0 2
3
0 0 1 0 j 0 0 1 0
0 0 0 1 j 1 0 1 0
3
7
7
5 !
L4+L2!L2
6L3+L1!L1
!
L4+L2!L2
6L3+L1!L1
2
6
6
4
3 0 0 0 j 0 0 6 1
0 2 4 0 j 1 1 1 2
3
0 0 1 0 j 0 0 1 0
0 0 0 1 j 1 0 1 0
3
7
7
5 !1
2
L2!L2
1
3
L1!L1
183](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-183-320.jpg)

![Assim, a solução geral de Ba;1X = 0 é dada por:
( 2s; 2 +
a2
2
s; s; as) : s 2 R
Logo, a solução geral do sistema linear Ba;1X = D é dada por:
f(0; 0; 1; 0)g+ 2s; 2 +
a2
2
s; s; as : s 2 R = 2s; 2 +
a2
2
s; s 1; as : s 2 R .
Resolução Alternativa.
[Ba;1 j D] =
2
6
6
4
0 0 a 1 j a
2 2 0 a j 0
0 0 a 1 j a
3 0 6 0 j 6
3
7
7
5 !
L1+L3!L3
3
2
L2+L4!L4
2
6
6
4
0 0 a 1 j a
2 2 0 a j 0
0 0 0 0 j 0
0 3 6 3
2
a j 6
3
7
7
5 !
L1$L2
L3$L4
!
L1$L2
L3$L4
2
6
6
4
2 2 0 a j 0
0 0 a 1 j a
0 3 6 3
2
a j 6
0 0 0 0 j 0
3
7
7
5 !
L2$L3
2
6
6
4
2 2 0 a j 0
0 3 6 3
2
a j 6
0 0 a 1 j a
0 0 0 0 j 0
3
7
7
5.
Tem-se então
8
><
>:
2x + 2y + aw = 0
3y + 6z
3
2
aw = 6
az + w = a
,
8
><
>:
x = 2z 2
y = a2
2
+ 2 (z + 1)
w = a az
Logo, a solução geral do sistema linear Ba;1X = D é dada por:
2s 2;
a2
2
+ 2 (s + 1) ; s; a as : s 2 R = 2s; 2 +
a2
2
s; s 1; as : s 2 R :
185](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-185-320.jpg)













![Logo A é invertível e
A 1
= I
1
1 + uT v
uvT
.
Sendo u; v 2 Mn 1 (R)
u =
2
6
6
6
4
u1
u2
...
un
3
7
7
7
5
v =
2
6
6
6
4
v1
v2
...
vn
3
7
7
7
5
tem-se
uT
v = u1 u2 un
2
6
6
6
4
v1
v2
...
vn
3
7
7
7
5
= [u1v1 + u2v2 + + un]
e
tr uvT
=
2
6
6
6
4
tr
0
B
B
B
@
2
6
6
6
4
u1
u2
...
un
3
7
7
7
5
v1 v2 vn
1
C
C
C
A
3
7
7
7
5
=
=
2
6
6
6
4
tr
2
6
6
6
4
u1v1 u1v2 u1vn
u2v1 u2v2 u2vn
...
...
...
...
unv1 unv2 unvn
3
7
7
7
5
3
7
7
7
5
= [u1v1 + u2v2 + + un] .
Logo
uT
v = tr uvT
.
199](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-199-320.jpg)


![(vii)
2 1 1
5 1 3
2 3 2
=
2 3 2
5 1 3
2 1 1
=
por (vi)
13 6= 0, logo a matriz é invertível.
(viii)
8 12 8
5 1 3
2 1 1
= 4
2 3 2
5 1 3
2 1 1
=
por (vi)
52 6= 0, logo a matriz é invertível.
(ix)
1 2 3
4 5 6
7 8 9
=
1 2 3
2 1 0
4 2 0
=
1 2 3
2 1 0
0 0 0
= 0, logo a matriz não é invertível.
(x)
0 1 0 0
1 0 1 0
0 1 0 1
0 0 1 0
=
0 1 0 0
1 0 0 0
0 0 0 1
0 0 1 0
=
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
= 1 6= 0, logo a matriz é invertível.
(xi)
2 2 8 6
0 1 2 0
0 0 3 23
0 0 0 5
= 30 6= 0, logo a matriz é invertível.
(xii)
1 3 1 1
1 2 1 1
2 1 1 1
2 0 2 0
=
1 3 1 1
0 1 2 2
2 1 1 1
2 0 2 0
= 2( 1)4+1
3 1 1
1 2 2
1 1 1
+( 2)( 1)4+3
1 3 1
0 1 2
2 1 1
=
= 2 [ 6 + 1 + ( 2) ( 1) ( 2) 6] + 2 [1 + 12 2 2] = 20 + 18 = 38 6= 0,
logo a matriz é invertível.
(xiii)
0 0 0 5
0 0 3 23
0 1 2 0
2 2 8 6
=
2 2 8 6
0 1 2 0
0 0 3 23
0 0 0 5
=
por (xi)
30 6= 0, logo a matriz é
invertível.
(xiv)
12
22
32
42
22
32
42
52
32
42
52
62
42
52
62
72
=
12
22
32
42
3 5 7 9
5 7 9 11
7 9 11 13
=
12
22
32
42
3 5 7 9
2 2 2 2
2 2 2 2
=
12
22
32
42
3 5 7 9
2 2 2 2
0 0 0 0
=
= 0, logo a matriz não é invertível.
202](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-202-320.jpg)







![19. Sejam 6= 0 e A = (aij)n n.
det i j
aij =
a11
1
a12
1
2 a13 : : : 1
n 2 a1 n 1
1
n 1 a1n
a21 a22
1
a23 : : : 1
n 3 a2 n 1
1
n 2 a2n
... a32 a33
...
... a43
... 1
an 2 n 1
...
...
... an 1 n 1
1
an 1 n
n 1
an1
n 2
an2
n 3
an3 : : : an n 1 ann
=
=
1
:::
1
n 2
1
n 1
n 1
a11
n 2
a12
n 3
a13 : : : a1 n 1 a1n
n 1
a21
n 2
a22
n 3
a23 : : : a2 n 1 a2n
... n 2
a32
n 3
a33
...
... n 3
a43
... an 2 n 1
...
...
... an 1 n 1 an 1 n
n 1
an1
n 2
an2
n 3
an3 : : : an n 1 ann
=
=
1
:::
1
n 2
1
n 1
n 1 n 2
:::
a11 a12 a13 : : : a1 n 1 a1n
a21 a22 a23 : : : a2 n 1 a2n
... a32 a33
...
... a43
... an 2 n 1
...
...
... an 1 n 1 an 1 n
an1 an2 an3 : : : an n 1 ann
= det A.
20. Seja
A =
2
4
1 a a2
1 b b2
1 c c2
3
5 ,
com a; b; c 2 R. A matriz A é invertível se e só se det A 6= 0. Tem-se
det A =
1 a a2
1 b b2
1 c c2
=
1 a a2
0 b a b2
a2
0 c a c2
a2
= 0
se a = b ou a = c. Se a 6= b e a 6= c então
det A =
1 a a2
1 b b2
1 c c2
=
1 a a2
0 b a b2
a2
0 c a c2
a2
=
1 a a2
0 b a b2
a2
0 0 c2
a2
(c a)(b + a)
=
=
1 a a2
0 b a b2
a2
0 0 (c a) [(c + a) (b + a)]
=
1 a a2
0 b a b2
a2
0 0 (c a) (c b)
= 0
se b = c.
210](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-210-320.jpg)



























































![38. (i) Se A 2 M3 3(R) é tal que car A = 3 e car[A j B] = 3 então
car A = dim L(A) = dim C(A) = 3.
Logo,
nul A = dim N(A) = 0.
Como carAT
= dim L(AT
) = dim C(AT
) = 3 então
nul AT
= dim N(AT
) = 0.
O correspondente sistema de equações lineares não homogéneo AX = B é possível e deter-
minado. Neste caso, na solução geral de AX = B, não existe nenhum parâmetro.
(ii) Se A 2 M3 3(R) é tal que car A = 2 e car[A j B] = 3 então
car A = dim L(A) = dim C(A) = 2:
Logo,
nul A = dim N(A) = 1:
Como carAT
= dim L(AT
) = dim C(AT
) = 2 então
nul AT
= dim N(AT
) = 1:
O correspondente sistema de equações lineares não homogéneo AX = B é impossível.
(iii) Se A 2 M3 3(R) é tal que car A = 1 e car[A j B] = 1 então
car A = dim L(A) = dim C(A) = 1:
Logo,
nul A = dim N(A) = 2:
Como carAT
= dim L(AT
) = dim C(AT
) = 1 então
nul AT
= dim N(AT
) = 2:
O correspondente sistema de equações lineares não homogéneo AX = B é possível e inde-
terminado. Neste caso, na solução geral de AX = B, existem dois parâmetros.
(iv) Se A 2 M5 9(R) é tal que car A = 2 e car[A j B] = 2 então
car A = dim L(A) = dim C(A) = 2:
Logo,
nul A = dim N(A) = 7:
Como carAT
= dim L(AT
) = dim C(AT
) = 2 então
nul AT
= dim N(AT
) = 3:
O correspondente sistema de equações lineares não homogéneo AX = B é possível e inde-
terminado. Neste caso, na solução geral de AX = B, existem 7 parâmetros.
270](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-270-320.jpg)
![(v) Se A 2 M9 5(R) é tal que car A = 2 e car[A j B] = 3 então
car A = dim L(A) = dim C(A) = 2:
Logo,
nul A = dim N(A) = 3:
Como carAT
= dim L(AT
) = dim C(AT
) = 2 então
nul AT
= dim N(AT
) = 7:
O correspondente sistema de equações lineares não homogéneo AX = B é impossível.
(vi) Se A 2 M4 4(R) é tal que car A = 0 e car[A j B] = 0 então
car A = dim L(A) = dim C(A) = 0:
Logo,
nul A = dim N(A) = 4:
Como carAT
= dim L(AT
) = dim C(AT
) = 0 então
nul AT
= dim N(AT
) = 4:
O correspondente sistema de equações lineares não homogéneo AX = B é possível e inde-
terminado. Neste caso, na solução geral de AX = B, existem 4 parâmetros.
(vii) Se A 2 M6 2(R) é tal que car A = 2 e car[A j B] = 2 então
car A = dim L(A) = dim C(A) = 2:
Logo,
nul A = dim N(A) = 0:
Como carAT
= dim L(AT
) = dim C(AT
) = 2 então
nul AT
= dim N(AT
) = 4:
O correspondente sistema de equações lineares não homogéneo AX = B é possível e deter-
minado. Neste caso, na solução geral de AX = B, não existe nenhum parâmetro.
39. Queremos encontrar A tal que N(A) = L (f(2; 0; 1)g). Por de…nição N(A) =
fu 2 R3
: Au = 0g. Por outro lado, temos
L (f(2; 0; 1)g) = f (2; 0; 1) : 2 Rg = (u1; u2; u3) 2 R3
: u2 = 0 e u1 = 2u3 .
Por exemplo:
A =
1 0 2
0 1 0
veri…ca
N(A) = L (f(2; 0; 1)g) ,
271](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-271-320.jpg)



















![12. Seja y 2 C (A + B). Então existe x tal que
y = (A + B) x = Ax + Bx 2 C (A) + C (B) :
Logo
C (A + B) C (A) + C (B) :
13. Seja A 2 Mm n(R). Vejamos que
N AT
C (A) = f0g :
Seja y 2 N AT
C (A). Então existe x tal que
AT
y = 0 e y = Ax:
Logo
yT
= xT
AT
e
0 = xT
AT
y = xT
AT
y = yT
y:
Isto é
0 = yT
y =
nX
i=1
y2
i
ou seja
y = (y1; :::; yn) = (0; :::; 0) = 0.
Logo, sem perda de generalidade,
N (A) L (A) = f0g :
14. Como B = C + B C e C (B) = C (C + B C) C (C) + C (B C) então
car B = dim C (B) dim C (C) + dim C (B C) = car C + car (B C) :
Pelo que car B car C car (B C). De um modo análogo, como
C = B + [ (B C)]
e
C (C) = C (B + [ (B C)]) C (B) + C (B C)
então
car C car B car (B C) :
Logo
jcar B car Cj car (B C) :
15. Sejam ; ; ; 2 R tais que
v + Av + A2
v + A3
v = 0:
Multiplicando a igualdade anterior por A3
e atendendo a que A4
= 0 e assim A5
=
A6
= A7
= 0, então A3
v = 0 e deste modo = 0 uma vez que A3
v 6= 0 (v =2 N(A3
)).
Analogamente: multiplicando a igualdade Av+ A2
v+ A3
v = 0 por A2
tem-se = 0,
multiplicando a igualdade A2
v+ A3
v = 0 por A tem-se = 0 e …nalmente de A3
v =
0 obtém-se = 0. Logo, o conjunto fv; Av; A2
v; A3
vg é linearmente independente.
291](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-291-320.jpg)




![uma vez que T(1) = (2; 0; 1). Tem-se
N(T) = fx 2 R : T(x) = (0; 0; 0)g = fx 2 R : (2x; 0; x) = (0; 0; 0)g = f0g .
Logo, dim N(T) = 0. Uma vez que
dim R|{z}
espaço de partida
= dim N(T) + dim I(T),
então dim I(T) = 1. Vejamos como encontrar uma base para I(T). Tem-se
I(T) = f(2x; 0; x) : x 2 Rg = fx(2; 0; 1) : x 2 Rg = L (f(2; 0; 1)g) .
Como o conjunto f(2; 0; 1)g é linearmente independente e como gera I(T) então f(2; 0; 1)g
é uma base de I(T).
Por outro lado, como I(T) 6= R3
então T não é sobrejectiva. Como N(T) = f0g então T
é injectiva.
Resolução alternativa para encontrar uma base para I(T). Sendo
M(T; Bc; B3
c ) =
2
4
2
0
1
3
5 ,
a matriz que representa a transformação linear T em relação às bases canónicas Bc no espaço
de partida e B3
c no espaço de chegada, tem-se
T(x) = M(T; B3
c ; B3
c ) [x] .
Logo,
N(T) = N M(T; Bc; B3
c ) = N
0
@
2
4
2
0
1
3
5
1
A = N
0
@
2
4
2
0
0
3
5
1
A = L (f0g) = f0g
e
I(T) = C M(T; Bc; B3
c ) = C
0
@
2
4
2
0
1
3
5
1
A = L (f(2; 0; 1)g) .
O conjunto f(2; 0; 1)g é uma base de I(T).
(viii) T : R3
! R2
com T(x; y; z) = (x2
y; 2y). T não é linear, pois por exemplo:
T ((1; 0; 0) + (1; 0; 0)) = T(2; 0; 0) = (4; 0) 6= (2; 0) = T(1; 0; 0) + T(1; 0; 0).
(ix) Seja T : R4
! R2
com T(x; y; z; w) = (x y; 3w). T é linear e tem-se
M(T; B4
c ; B2
c ) =
1 1 0 0
0 0 0 3
,
296](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-296-320.jpg)


















































![b)
N (M(T1; B1; B2)) = N
1 2 0
0 1 1
= f( 2y; y; y) : y 2 Rg = L (f( 2; 1; 1)g) :
Logo
N(T1) = L ( 2) (1 + t) + 1 (1 t) + 1t2
= L 1 3t + t2
:
Base para
N(T1) : 1 3t + t2
:
T1 é sobrejectiva:
dim I(T1) = dim P2 dim N(T1) = 2 = dim P1:
c)
T1(t) =
1
2
[T1 (1 + t) T1 (1 t)] =
=
1
2
[1 (1 + t) + 0 (1 + 2t) 2 (1 + t) + 1 (1 + 2t)] =
1
2
t , T1(2t) = t
(uma vez que T1 é linear), logo a solução geral da equação T1(p (t)) = t é:
f2tg + N(T1) = 2t + c 1 3t + t2
: c 2 R :
d) f1; tg é uma base de P1. Como
(T1 T2) (1) = T1 (T2(1)) = T1 (1 t) = 2 (1 + t) 1 (1 + 2t) = 1
e
(T1 T2) (t) = T1 (T2(t)) = T1 2 + 8t 2t2
=
= 5T1 (1 + t) 3T1 (1 t) 2T1t2
=
= 5 [1 (1 + t) + 0 (1 + 2t)] 3 [2 (1 + t) (1 + 2t)] 2 [0 (1 + t) + 1 (1 + 2t)] = t;
então T1 T2 = I.
347](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-347-320.jpg)

![então
1 + 2 = 5 e 1 2 = 6
Logo
[ 1 = 5 2 e (5 2) 2 = 6] , ( = 3 ou = 2),
isto é, os valores próprios de A são 3 e 2.
4. Determinemos uma matriz A real simétrica (AT
= A) 2 2 cujos valores próprios
sejam 2 e 2 e tal que (2; 1) seja um vector próprio associado ao valor próprio 2.
Seja A =
a b
c d
2 M2 2 (R) tal que A = AT
. Logo b = c. Além disso, sendo 2 e 2
dois valores próprios de A tem-se
0 = det (A + 2I) = det
a + 2 b
b d + 2
= b2
+ 2a + 2d + ad + 4
e
0 = det (A 2I) = det
a 2 b
b d 2
= b2
2a 2d + ad + 4
sendo (2; 1) um vector próprio associado ao valor próprio 2 tem-se
a b
b d
2
1
= 2
2
1
, (2a + b = 4 e 2b + d = 2).
Logo
8
>><
>>:
b2
+ 2a + 2d + ad + 4 = 0
b2
2a 2d + ad + 4 = 0
2a + b = 4
2b + d = 2
,
8
>>>><
>>>>:
a = 6
5
b = 8
5
d = 6
5
e assim
A =
a b
b d
=
2
4
6
5
8
5
8
5
6
5
3
5 .
5. Considere a transformação linear T : R3
! R3
que admite os vectores próprios
v1 = (1; 2; 1); v2 = ( 1; 0; 1); v3 = (0; 1; 0);
associados respectivamente aos valores próprios 1; 2 e 3.
Determinemos a expressão geral de T.
Seja (x; y; z) 2 R3
. Existem ; ; 2 R tais que
(x; y; z) = (1; 2; 1) + ( 1; 0; 1) + (0; 1; 0).
349](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-349-320.jpg)


![O conjunto f(0; 1; 1)g é uma base de E 3 .
Os vectores próprios de T associados ao valor próprio 3 = 4 são
u = (0; s; s) , com s 2 Rn f0g .
7. Considere a transformação linear T : R2
! R2
de…nida por
T(1; 2) = (5; 5) = T(2; 1).
(i) Como
(1; 1) = (1; 2) + (2; 1)
Tem-se
T (v1) = T(1; 1) = T [ (1; 2) + (2; 1)] =
T é linear
T(1; 2) + T(2; 1) =
= (5; 5) + (5; 5) = (0; 0) = 0(1; 1) = 0v1:
Como
(1; 1) =
1
3
(1; 2) +
1
3
(2; 1)
Tem-se
T (v2) = T(1; 1) = T
1
3
(1; 2) +
1
3
(2; 1) =
T é linear
1
3
T(1; 2) +
1
3
T(2; 1) =
=
1
3
[(5; 5) + (5; 5)] =
10
3
(1; 1) =
10
3
v2:
Logo, v2 é um vector próprio de T associado ao valor próprio 10
3
.
(ii) Como 0 é valor próprio de T então T não é invertível. Como os vectores v1 = (1; 1)
e v2 = (1; 1) formam uma base de R2
pois são dois vectores linearmente independentes em
R2
e dim R2
= 2 e além disso, v1 e v2 são vectores próprios de T, então existe uma base de
R2
formada só com vectores próprios de T, ou seja, T é diagonalizável.
(iii) Seja Bvp = fv1; v2g = f(1; 1); (1; 1)g. Tem-se
M(T; Bvp; Bvp) =
0 0
0 10
3
,
uma vez que T(v1) = 0v1 = 0v1+0v2 e T(v2) = 10
3
v2 = 0v1+10
3
v2 e deste modo as coordenadas
(0; 0) e (0; 10
3
) constituem respectivamente a 1a
e 2a
colunas de M(T; Bvp; Bvp).
Logo, Bvp é uma base de R2
em relação à qual T pode ser representada por uma matriz
diagonal, por ser uma base formada só com vectores próprios de T.
(iv) Seja A = M(T; Bvp; Bvp), com Bvp = f(1; 1); (1; 1)g. O polinómio característico é
dado por
det(A I) =
0
0 10
3
=
10
3
.
352](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-352-320.jpg)



![Logo, como 0 não é valor próprio de T então T é invertível.
Os valores próprios de T são os valores próprios de A, isto é, são os valores de para os
quais det(A I) = 0.
O polinómio característico é dado por
det(A I) =
2 3
3 2
= (2 )2
9 = [(2 ) 3] [(2 ) + 3] =
= ( 1 ) (5 )
Logo, os valores próprios de T são
1 = 1 e 2 = 5.
Como T tem 2 valores próprios distintos, os vectores próprios correspondentes a cada um
deles irão ser linearmente independentes e como tal irá existir uma base de R2
formada só
com vectores próprios de T, ou seja, T é diagonalizável.
(ii) O subespaço próprio E 1 é dado por
E 1 = N (T 1I) = f (1; 2) + (2; 1) : ( ; ) 2 N (A ( 1) I)g =
= (1; 2) + (2; 1) : ( ; ) 2 N
3 3
3 3
=
= (1; 2) + (2; 1) : ( ; ) 2 N
3 3
0 0
=
= f (1; 2) + (2; 1) : ( ; ) 2 L (f( 1; 1)g)g =
= f ( 1; 1) : 2 Rg = L (f( 1; 1)g) .
O conjunto f( 1; 1)g é uma base de E 1 .
Os vectores próprios de T associados ao valor próprio 1 = 1 são
u = ( s; s), com s 2 Rn f0g .
O subespaço próprio E 2 é dado por
E 1 = N (T 1I) = f (1; 2) + (2; 1) : ( ; ) 2 N (A 5I)g =
= (1; 2) + (2; 1) : ( ; ) 2 N
3 3
3 3
=
= (1; 2) + (2; 1) : ( ; ) 2 N
3 3
0 0
=
= f (1; 2) + (2; 1) : ( ; ) 2 L (f(1; 1)g)g =
= f (1; 1) : 2 Rg = L (f(1; 1)g) .
O conjunto f(1; 1)g é uma base de E 2 .
Os vectores próprios de T associados ao valor próprio 2 = 5 são
u = (s; s), com s 2 Rn f0g .
356](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-356-320.jpg)






![(i) O polinómio característico é dado por
det(A I) =
1 1
0 2 1
0 1 2
= (2 )2
+ = (2 )2
1 =
= [((2 ) 1) ((2 ) + 1)] = (1 ) (3 )
= 3
+ 4 2
3 .
(ii) Os valores próprios de T são os valores próprios de A, isto é, são os valores de para
os quais det(A I) = 0. Logo, os valores próprios de T são
1 = 0, 2 = 1 e 3 = 3.
O subespaço próprio E 1 é dado por
E 1 = N (T 1I) = N (A 1I) =
= N
0
@
2
4
0 1 1
0 2 1
0 1 2
3
5
1
A = N
0
@
2
4
0 1 1
0 1 0
0 0 1
3
5
1
A =
= f(x; y; z) : y = z = 0g =
= f(x; 0; 0) : x 2 Rg = L (f(1; 0; 0)g) .
O conjunto f(1; 0; 0)g é uma base de E 1 .
Os vectores próprios de T associados ao valor próprio 1 = 0 são
u = (s; 0; 0), com s 2 Rn f0g .
O subespaço próprio E 2 é dado por
E 2 = N (T 2I) = N (A 2I) =
= N
0
@
2
4
1 1 1
0 1 1
0 1 1
3
5
1
A = N
0
@
2
4
1 1 1
0 1 1
0 0 0
3
5
1
A =
= f(x; y; z) : x + y + z = 0 e y + z = 0g =
= f(x; y; z) : x = 0 e y + z = 0g =
= f(0; z; z) : z 2 Rg = L (f(0; 1; 1)g) .
O conjunto f(0; 1; 1)g é uma base de E 2 .
Os vectores próprios de T associados ao valor próprio 2 = 1 são
u = (0; s; s), com s 2 Rn f0g .
363](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-363-320.jpg)


![Logo, a matriz que representa T em relação à base canónica Bc de R3
é dada por:
B = M (T; Bc; Bc) = SB!Bc
2
4
7 4 2
1 7 1
1 2 10
3
5 (SB!Bc ) 1
=
=
2
4
0 1 1
1 0 0
0 1 1
3
5
2
4
7 4 2
1 7 1
1 2 10
3
5
2
4
0 1 0
1
2
0 1
2
1
2
0 1
2
3
5 =
2
4
9 0 0
3 7 1
3 2 8
3
5 .
Note que deste modo, para todo o (x; y; z) 2 R3
tem-se
T(x; y; z) = B
2
4
x
y
z
3
5 = (9x; 3x + 7y z; 3x 2y + 8z) .
(i) O polinómio característico é dado por
det(A I) = det(B I) =
9 0 0
3 7 1
3 2 8
= (9 ) [(7 ) (8 ) 2] =
= (9 ) 2
15 + 54 = (9 ) ( 9) ( 6) =
= ( 9)2
( 6) .
(ii) Os valores próprios de T são os valores próprios de B, isto é, são os valores de para
os quais det(B I) = 0. Logo, os valores próprios de T são
1 = 9 e 2 = 6.
O subespaço próprio E 1 é dado por
E 1 = N (T 1I) = N (B 1I) =
= N
0
@
2
4
0 0 0
3 2 1
3 2 1
3
5
1
A = N
0
@
2
4
0 0 0
0 0 0
3 2 1
3
5
1
A =
= (x; y; z) 2 R3
: 3x 2y z = 0 =
= f(x; y; 3x 2y) : x; y 2 Rg = L (f(1; 0; 3); (0; 1; 2)g) .
O conjunto f(1; 0; 3); (0; 1; 2)g é uma base de E 1 .
Os vectores próprios de T associados ao valor próprio 1 = 9 são
u = (s; t; 3s 2t), com s; t 2 Rn f0g .
O subespaço próprio E 2 é dado por
E 2 = N (T 2I) = N (B 2I) =
= N
0
@
2
4
3 0 0
3 1 1
3 2 2
3
5
1
A = N
0
@
2
4
3 0 0
0 1 1
0 0 0
3
5
1
A =
= f(x; y; z) : 3x = 0 e y z = 0g =
= f(0; z; z) : z 2 Rg = L (f(0; 1; 1)g) .
366](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-366-320.jpg)



![A matriz M(T; B2 2
c ; B2 2
c ) que representa T em relação à base canónica (ordenada) B2 2
c
é dada por
M(T; B2 2
c ; B2 2
c ) =
2
6
6
4
2 0 0 0
0 1 1 0
0 1 1 0
0 0 0 2
3
7
7
5 ,
uma vez que
T
1 0
0 0
=
2 0
0 0
= 2
1 0
0 0
+ 0
0 1
0 0
+ 0
0 0
1 0
+ 0
0 0
0 1
,
T
0 1
0 0
=
0 1
1 0
= 0
1 0
0 0
+
0 1
0 0
+
0 0
1 0
+ 0
0 0
0 1
,
T
0 0
1 0
=
0 1
1 0
= 0
1 0
0 0
+
0 1
0 0
+
0 0
1 0
+ 0
0 0
0 1
,
e
T
0 0
0 1
=
0 0
0 2
= 0
1 0
0 0
+ 0
0 1
0 0
+ 0
0 0
1 0
+ 2
0 0
0 1
.
(ii) Seja A = M(T; B2 2
c ; B2 2
c ). O polinómio característico é dado por
det(A I) =
2 0 0 0
0 1 1 0
0 1 1 0
0 0 0 2
= (2 )2
(1 )2
1 =
= (2 )2
[((1 ) 1) ((1 ) + 1)] =
= (2 )3
.
Os valores próprios de T são os valores próprios de A, isto é, são os valores de para os
quais det(A I) = 0. Logo, os valores próprios de T são
1 = 0 e 2 = 2.
370](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-370-320.jpg)



![É possível ter uma base de R2
constituída só por vectores próprios de A1:
Bvp = f(1; 1); (1; 2)g ,
uma vez que
dim E 1 + dim E 2 = 2.
Logo, a matriz A1 é diagonalizável e tem-se
D1 = P1A1P 1
1 ,
com
P 1
1 = SBvp!B2
c
=
1 1
1 2
e
D1 = 1 0
0 2
=
3 0
0 4
.
(ii) Seja A2 =
2
4
2 1 1
0 3 1
0 1 3
3
5. Tem-se
det(A2 I) =
2 1 1
0 3 1
0 1 3
= (2 ) (3 )2
1 =
= (2 ) [(3 ) 1] [(3 ) + 1] = (2 )2
(4 ) .
Os valores próprios de A2 são
1 = 2 e 2 = 4.
O subespaço próprio E 1 é dado por
E 1 = N (A2 1I) =
= N
0
@
2
4
2 1 1 1
0 3 1 1
0 1 3 1
3
5
1
A = N
0
@
2
4
0 1 1
0 1 1
0 1 1
3
5
1
A =
= N
0
@
2
4
0 1 1
0 0 0
0 0 0
3
5
1
A = (x; y; z) 2 R3
: y + z = 0 =
= f(x; z; z) : x; z 2 Rg = L (f(1; 0; 0); (0; 1; 1)g) .
O conjunto f(1; 0; 0); (0; 1; 1)g é uma base de E 1 .
Os vectores próprios de A2 associados ao valor próprio 1 = 2 são
u = (s; t; t), com s; t 2 Rn f0g .
374](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-374-320.jpg)
![O subespaço próprio E 2 é dado por
E 2 = N (A2 2I) =
= N
0
@
2
4
2 2 1 1
0 3 2 1
0 1 3 2
3
5
1
A = N
0
@
2
4
2 1 1
0 1 1
0 1 1
3
5
1
A =
= N
0
@
2
4
2 1 1
0 1 1
0 0 0
3
5
1
A = (x; y) 2 R2
: 2x + y + z = 0 e y + z = 0 =
= f(z; z; z) : z 2 Rg = L (f(1; 1; 1)g) .
O conjunto f(1; 1; 1)g é uma base de E 2 .
Os vectores próprios de A2 associados ao valor próprio 2 = 4 são
u = (s; s; s), com s 2 Rn f0g .
É possível ter uma base de R3
constituída só por vectores próprios de A2:
Bvp = f(1; 0; 0); (0; 1; 1); (1; 1; 1)g ,
uma vez que
dim E 1 + dim E 2 = 3.
Logo, a matriz A2 é diagonalizável e tem-se
D2 = P2A2P 1
2 ,
com
P 1
2 = SBvp!B3
c
=
2
4
1 0 1
0 1 1
0 1 1
3
5
e
D2 =
2
4
1 0 0
0 1 0
0 0 2
3
5 =
2
4
2 0 0
0 2 0
0 0 4
3
5 .
(iii) Seja A3 =
2
4
1 1 0
1 1 0
0 0 0
3
5. Tem-se
det(A3 I) =
1 1 0
1 1 0
0 0
= ( ) (1 )2
1 =
= ( ) [(1 ) 1] [(1 ) + 1] = 2
(2 ) .
Os valores próprios de A3 são
1 = 0 e 2 = 2.
375](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-375-320.jpg)






![Sugestão: Sendo um valor próprio de A, considere C a matriz cujas colunas formam
uma base ordenada S de N (A I) e veri…que que (A I) BC = 0. Finalmente considere
a matriz P cujas colunas são respectivamente as coordenadas das colunas de BC em relação
à base S e sendo v um vector próprio de P mostre que Cv é um vector próprio comum a A
e B.
Dem. Suponhamos que as matrizes quadradas A e B são do tipo n n. Seja um valor
próprio de A. Tem-se N (A I) 6= f0g. Seja r = dim N (A I). Seja C a matriz n r
cujas colunas formam uma base ordenada S de N (A I). Tem–se
(A I) BC = ABC BC =
AB=BA
BAC BC = B (A I) C = B0 = 0
Seja P = (pij) a matriz r r cujas colunas são respectivamente as coordenadas das
colunas de BC em relação à base S. Tem-se, para k = 1; :::; r
[BC] k
| {z }
coluna k de BC
=
rX
i=1
pik [C] i
|{z}
coluna i de C
=
rX
i=1
[C] i pik.
Logo, tem-se
BC = CP.
Seja v um vector próprio de P associado a um valor próprio . Tem-se v 6= 0 e Cv 6= 0
pois C tem característica máxima (= no
de colunas). Além disso,
B (Cv) = (BC) v = (CP) v = C (Pv) = C ( vI) = (Cv) ,
isto é, Cv é um vector próprio de B associado ao valor próprio .
Por outro lado, tem-se
A (Cv) = (AC) v = ( IC) v = (Cv) ,
isto é, Cv é um vector próprio de A associado ao valor próprio .
Logo, Cv é um vector próprio comum a A e B.
14. Seja A uma matriz n n e sejam 1; 2 escalares, com 1 6= 2, tais que
(A 1I) (A 2I) = 0:
Atendendo a que
det (A 1I) det (A 2I) = 0 , (det (A 1I) = 0 ou det (A 2I) = 0)
então 1 é valor próprio de A ou 2 é valor próprio de A. Suponhamos sem perda de
generalidade (uma vez que (A 1I) (A 2I) = (A 2I) (A 1I)) que 1 é um valor
próprio de A. Atendendo a que
C (A 2I) N (A 1I) 6= f0g
então
n nul (A 2I) = car (A 2I) = dim C (A 2I) dim N (A 1I) = nul (A 1I)
isto é,
n nul (A 1I) + nul (A 2I) .
Logo, atendendo a que nul (A 1I) + nul (A 2I) n, tem-se
nul (A 1I) + nul (A 2I) = n
ou seja, A é diagonalizável.
382](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-382-320.jpg)



![Assim, a aplicação h; i : R3
R3
! R, de…nida por
h(x1; x2; x3); (y1; y2; y3)i = x1y1 + x2y2 + x3y3
é um produto interno, o chamado produto interno usual de R3
.
(ii) Consideremos a aplicação h; i : R3
R3
! R, de…nida por
h(x1; x2; x3); (y1; y2; y3)i = x1y2 x2y1.
Tem-se
h(x1; x2; x3); (y1; y2; y3)i = x1 x2 x3
2
4
0 1 0
1 0 0
0 0 0
3
5
2
4
y1
y2
y3
3
5 .
e como
2
4
0 1 0
1 0 0
0 0 0
3
5 não é simétrica, logo, a aplicação h; i não de…ne um produto interno
em R3
.
Resolução alternativa: Por exemplo
h(1; 1; 1); (1; 0; 0)i = 1 6= 1 = h(1; 0; 0); (1; 1; 1)i .
Logo, esta aplicação h; i não é um produto interno, uma vez que a condição de simetria não
é veri…cada.
(iii) Consideremos a aplicação h; i : R3
R3
! R, de…nida por
h(x1; x2; x3); (y1; y2; y3)i = 2x1y1 + x1y3 + x3y1 + 2x2y2 + x3y3,
com (x1; x2; x3); (y1; y2; y3) 2 R3
.
Tem-se
h(x1; x2; x3); (y1; y2; y3)i = x1 x2 x3
2
4
2 0 1
0 2 0
1 0 1
3
5
2
4
y1
y2
y3
3
5 .
e como
2
4
2 0 1
0 2 0
1 0 1
3
5 é simétrica e os seus valores próprios
det
2
4
2 0 1
0 2 0
1 0 1
3
5 = (2 ) det
2 1
1 1
=
= (2 ) [(2 ) (1 ) 1] = (2 ) 2
3 + 1 =
= (2 )
3
2
p
5
2
!
3
2
+
p
5
2
!
386](https://image.slidesharecdn.com/altp-131011190955-phpapp01/85/Altp-386-320.jpg)








































Este documento apresenta um conjunto de aulas teóricas e exercícios sobre álgebra linear, incluindo matrizes, sistemas de equações lineares, determinantes, espaços vectoriais, transformações lineares, valores e vetores próprios, produtos internos, forma quadrática e mínimos quadrados. O documento está dividido em duas partes, a primeira cobrindo os conceitos teóricos e a segunda resolvendo exercícios.




















![Matriz[1]](https://cdn.slidesharecdn.com/ss_thumbnails/matriz1-091124113217-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



![MatemáTica Matrizes [TaíS Andrade]](https://cdn.slidesharecdn.com/ss_thumbnails/matemtica-matrizestasandrade-100127025840-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






















