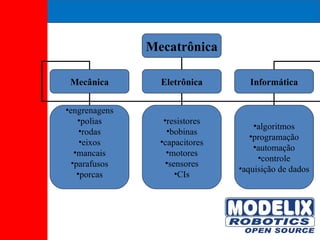
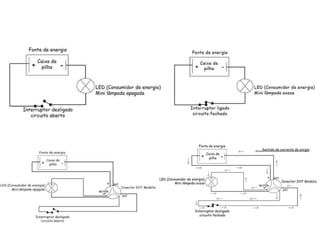
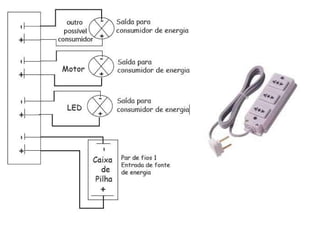
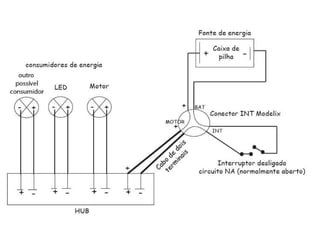
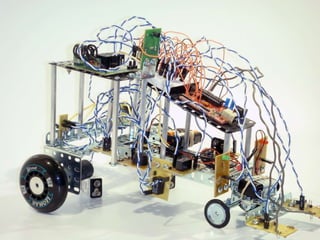
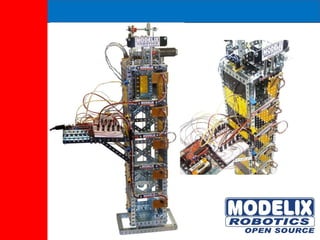
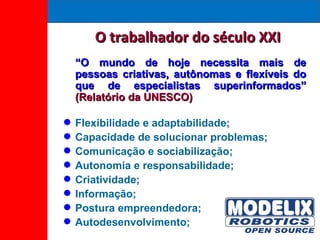
O documento aborda o conceito de robótica educacional, descrevendo suas principais características e os módulos que a compõem, como mecânica, atuadores e circuitos elétricos. Ele detalha a montagem de estruturas e componentes, e a importância de habilidades como criatividade e resolução de problemas para o trabalhador do século XXI. Além de interações práticas com circuitos, o texto sugere o uso de tecnologia de microcontroladores, enfatizando a flexibilidade e adaptabilidade no aprendizado.



















![E-mail para contato: [email_address] [email_address] Mandar nomes dos participantes para o e-mail abaixo : [email_address]](https://image.slidesharecdn.com/apresentaomodelix-100127084326-phpapp02/85/Modelix-Arduino-Hackweek-46-320.jpg)











































































