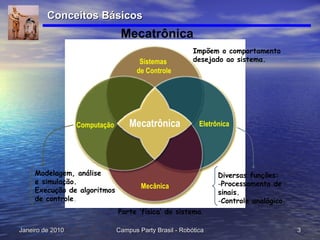
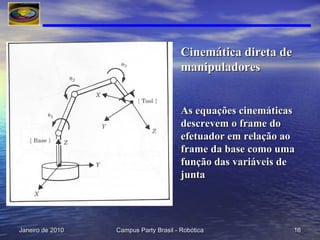
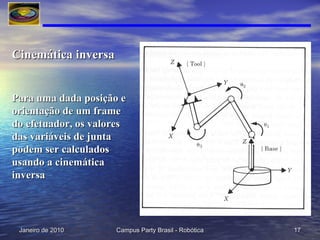
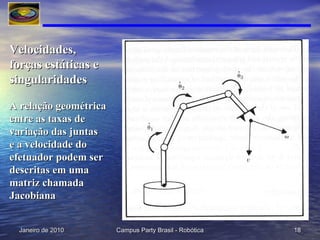
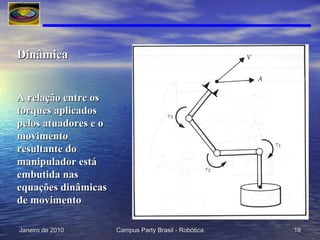
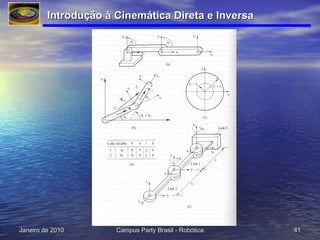
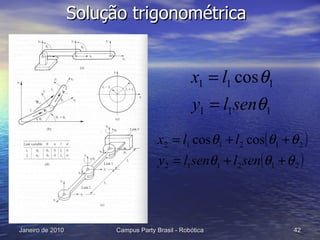
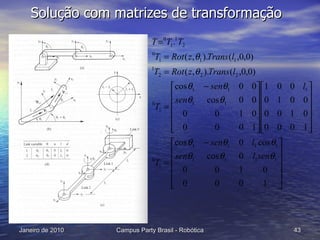
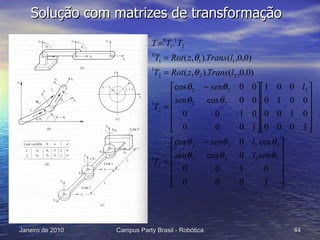
O documento discute a modelagem da cinemática robótica aplicada a manipuladores industriais, robôs móveis e humanóides. Apresenta os conceitos básicos de mecatrônica e robótica, tipos de juntas em robôs, graus de liberdade e exemplos como o robô Asimo. Também aborda cinemática direta e inversa, modelagem de robôs usando transformações de coordenadas e aplica esses conceitos ao estudo de caso do robô CP01.
![CAMPUS PARTY BRASIL 2010 CINEMÁTICA DE ROBÔS Prof. Dr. Marcelo Nicoletti Franchin [email_address] UNESP CAMPUS DE BAURU – FACULDADE DE ENGENHARIA](https://image.slidesharecdn.com/cinematicacp2010-100130101101-phpapp01/85/Cinematica-de-robos-1-320.jpg)
![CAMPUS PARTY BRASIL 2010 CINEMÁTICA DE ROBÔS Prof. Dr. Marcelo Nicoletti Franchin [email_address] UNESP CAMPUS DE BAURU – FACULDADE DE ENGENHARIA](https://image.slidesharecdn.com/cinematicacp2010-100130101101-phpapp01/75/Cinematica-de-robos-1-2048.jpg)