Baixado 23 vezes

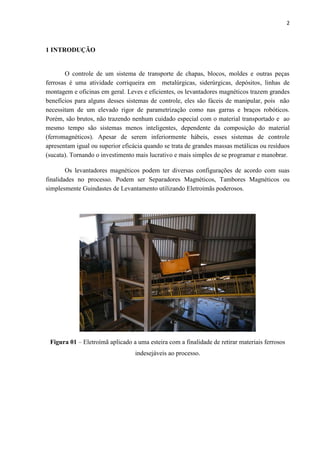
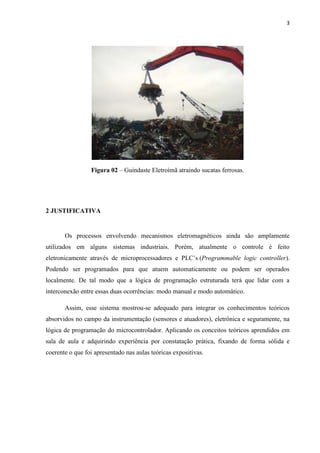
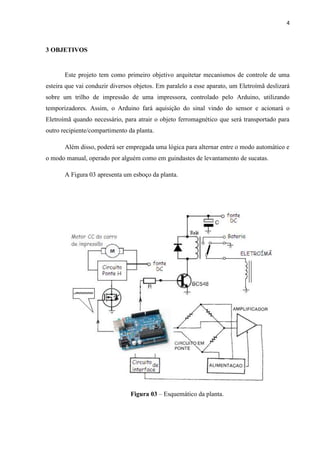







1. O documento descreve um projeto para controlar o transporte de objetos ferrosos usando um guindaste eletromagnético acoplado a um trilho de impressora controlado por um microcontrolador Arduino. 2. Será usado um sensor indutivo para detectar metais e acionar o guindaste eletromagnético para atrair o objeto quando este passar na esteira. 3. O Arduino controlará a esteira, o guindaste eletromagnético e alternará entre modos manual e automático de acordo com a programação





































































