Baixar para ler offline

![Sistemas em Tempo Contínuo
• Sistemas cujas entradas e saídas são sinais em tempo contínuo.
• y(t) = T{x(t)}
Sistemas em Tempo Discreto
• Sistemas cujas entradas e saídas são sinais discretos no tempo
• y[n] = T{x[n]}
Na maior parte do curso, trataremos de sistemas contínuos
no tempo, a menos que explicitamente seja especificado o
contrário.
SistemasSistemas emem TempoTempo ContContíínuonuo ee DiscretoDiscreto](https://image.slidesharecdn.com/sistemas2009-1-160518122700/85/Sistemas-2009-1-5-320.jpg)

![Sistema Transcendental
• R: Não-linear (falha nos dois princípios)
Sistema Quadrático
• R: Não-linear (falha nos dois princípios)
Diferenciação
• Homogeneidade:
• Adição:
• R: Linear
ExemplosExemplos dede SistemasSistemas LinearesLineares
( ) ( )[ ]txty cos=
( ) ( )txty 2
=
( ) ( )tx
dt
d
ty =
( )[ ] ( )tx
dt
d
atxa
dt
d
=⋅
( ) ( )[ ] ( ) ( )tx
dt
d
tx
dt
d
txtx
dt
d
2121 +=+
()⋅
dt
dx(t) y(t)](https://image.slidesharecdn.com/sistemas2009-1-160518122700/85/Sistemas-2009-1-10-320.jpg)

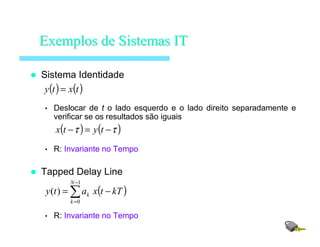
![Integração
• R: Invariante no Tempo
Sistema variante no tempo:
ExemplosExemplos dede SistemasSistemas ITIT
( ) ( ) λλ dxty
t
∫∞−
=
( ) ( ) ( ) λτλλλτ
τ
dxdxty
tt
∫∫ ∞−
−
∞−
−==−
( ) ( ) )2(][cos −= txtty](https://image.slidesharecdn.com/sistemas2009-1-160518122700/85/Sistemas-2009-1-15-320.jpg)

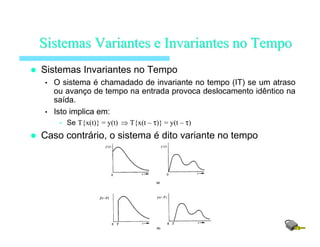
O documento define e discute vários conceitos relacionados a sistemas e sinais, incluindo: 1) Sistemas lineares x não lineares, com a definição de sistemas lineares requerendo adição e homogeneidade; 2) Sistemas variantes e invariantes no tempo, dependendo se um atraso na entrada causa um atraso idêntico na saída; 3) Sistemas causais, onde a saída depende apenas de entradas passadas, não futuras.