Baixado 58 vezes

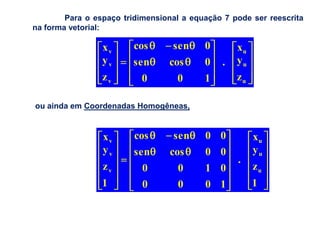

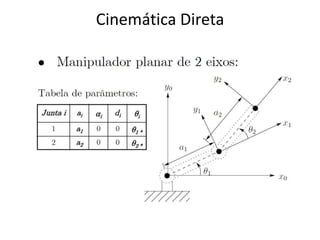

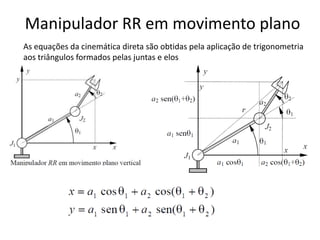
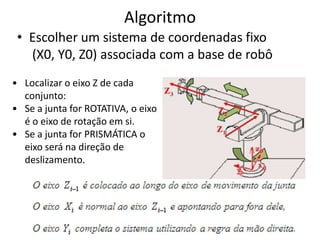

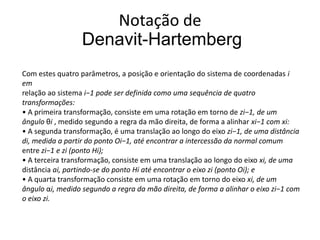
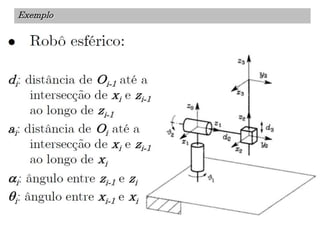
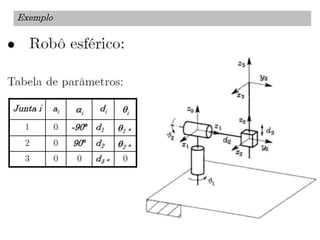
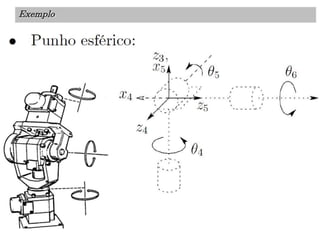
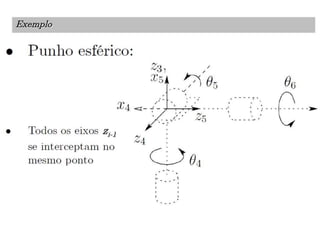
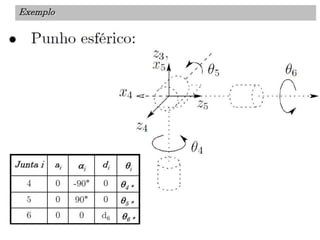
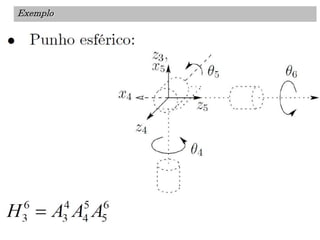
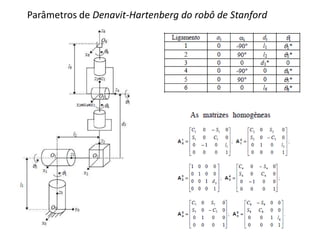
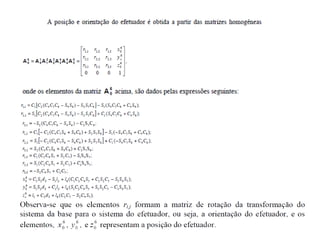
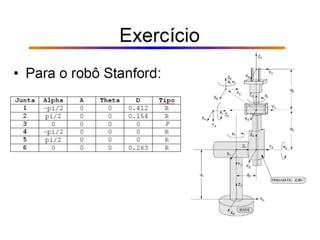
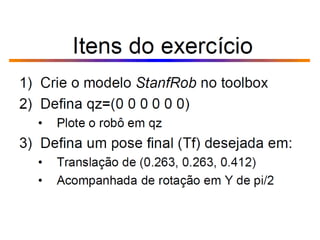

O documento discute a notação de Denavit-Hartenberg para representar a cinemática de robôs. Ele explica como escolher os sistemas de coordenadas para cada junta e como os parâmetros de Denavit-Hartenberg (a, α, d e θ) definem a posição relativa entre sistemas de coordenadas consecutivos. Também aborda exceções à notação e como aplicá-la para obter as equações da cinemática direta de um robô.













![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)






















![Isometrias porto ed[1]](https://cdn.slidesharecdn.com/ss_thumbnails/isometriasportoed1-111217162527-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





































