Baixado 305 vezes



![Torque
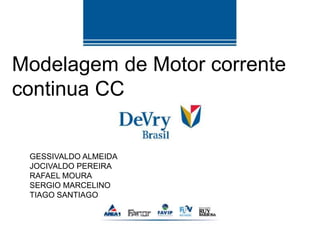
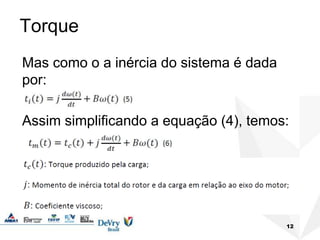
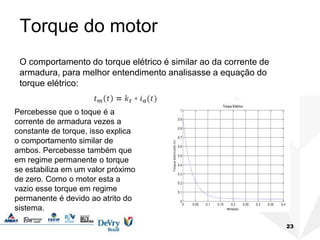
Como a soma dos torques do sistema é igual ao torque gerado pelo
motor [1], é possível escrever a equação (4).
11](https://image.slidesharecdn.com/modelodeapresetao-151121035906-lva1-app6891/85/Motor-CC-no-Matlab-11-320.jpg)
![Rotação
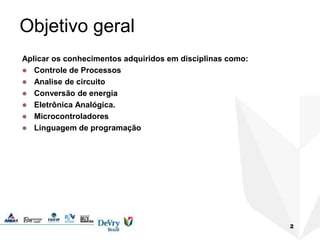
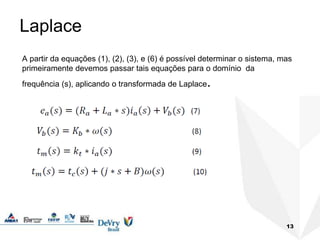
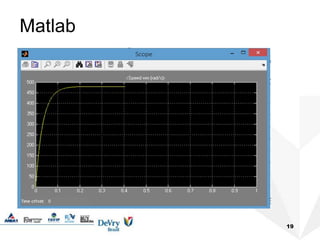
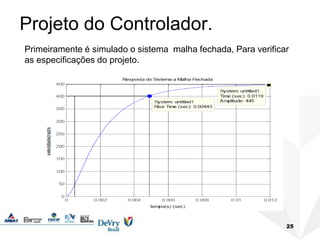
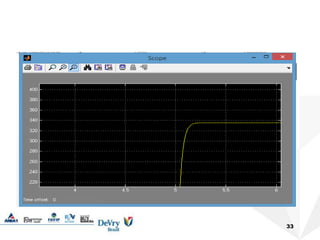
Ao analisar a Figura 3 percebesse
que a velocidade do motor simulado
é de 479,6 rad/s, em regime
permanente, o que resulta em
aproximadamente 4580,2 rpm, esse
resultado esta de coerente pois o
datasheet informa que a velocidade
a vazio do motor é de 4580 rmp [3].
Cabe resaltar que o gráfico mostra
gradativamente o aumento da
velocidade do motor e que entorno
de 0.2 segundos o motor já se
encontra em regime permanente.
20](https://image.slidesharecdn.com/modelodeapresetao-151121035906-lva1-app6891/85/Motor-CC-no-Matlab-20-320.jpg)
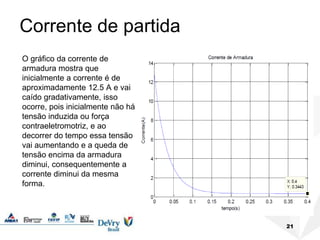
![Corrente de partida do Manual
22
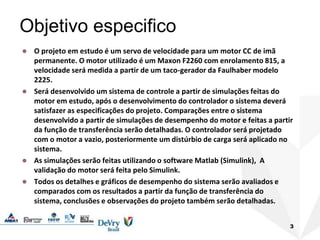
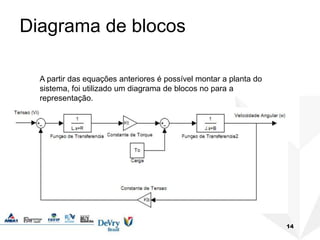
No datasheet do motor mostra que a resistência de
armadura é de 2.87 ohms, e a tensão nominal do
motor é de 36 volts [3], assim pela lei de Ohm, temos:
temos a corrente calculada que confere com a simulada, também
pode ser afirmado que em regime permanente a corrente de
armadura é de 0.3443 A e que a força contraeletromotriz é de
aproximadamente 35.0147 volts. (Para isso circuito resistivos são
empregados na partida do motor).](https://image.slidesharecdn.com/modelodeapresetao-151121035906-lva1-app6891/85/Motor-CC-no-Matlab-22-320.jpg)
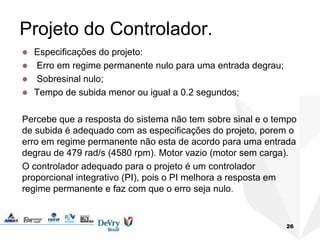
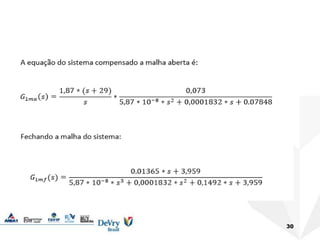
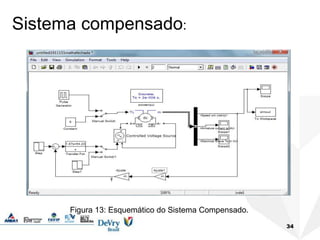


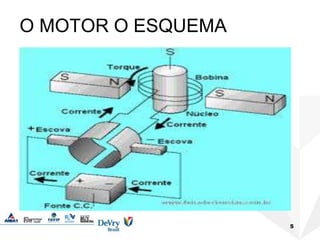
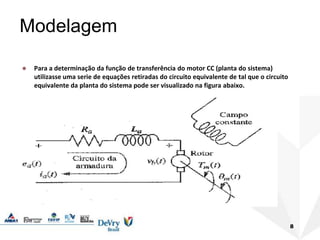
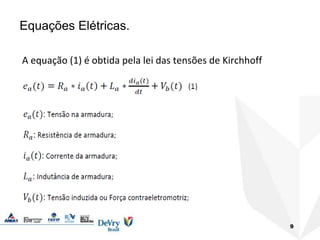
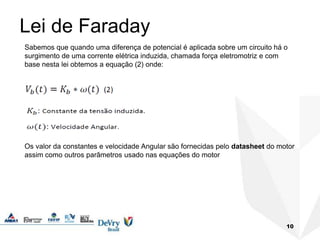
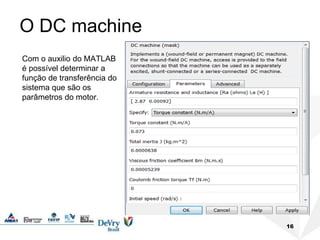
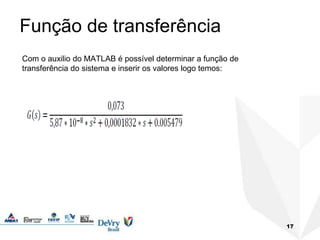
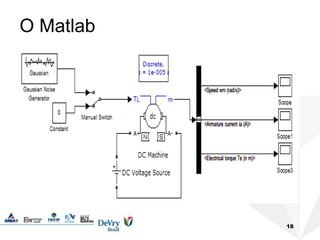
O documento discute a modelagem de um motor CC usando Simulink. Ele apresenta o objetivo geral e específico do projeto, descreve os componentes do motor CC, e discute a determinação da função de transferência e a simulação do sistema no Simulink. Os resultados das simulações são comparados com os dados do fabricante para validar o modelo.













![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)



























































