Baixado 953 vezes



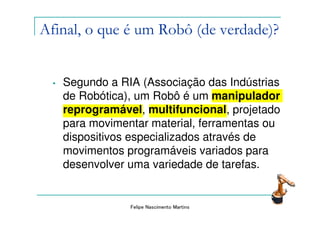
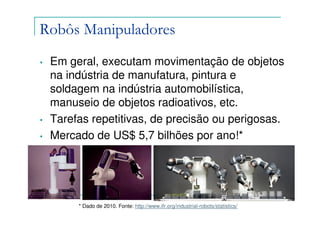



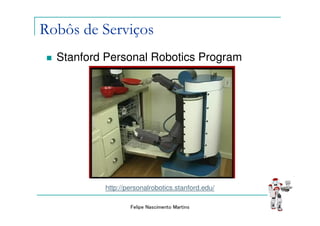



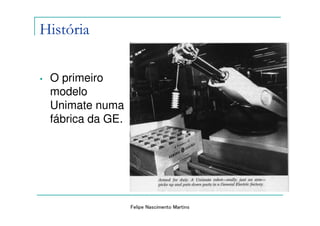
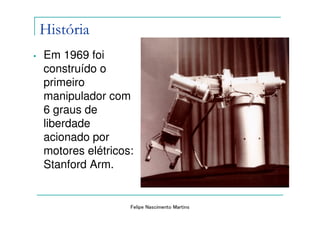



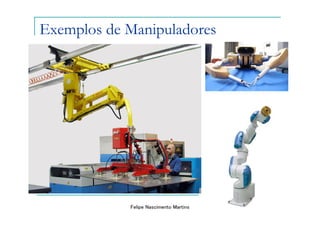
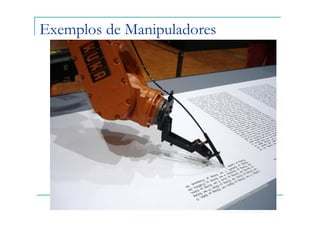
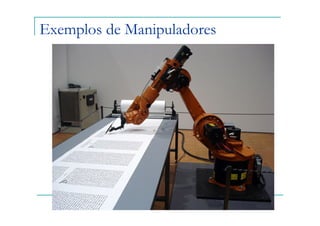





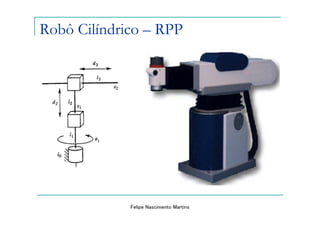
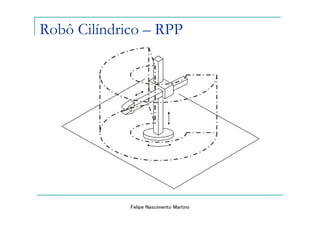
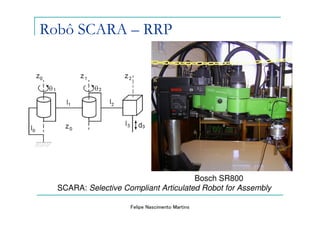
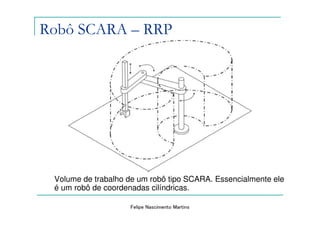

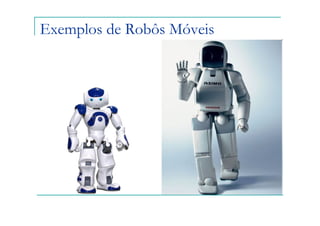


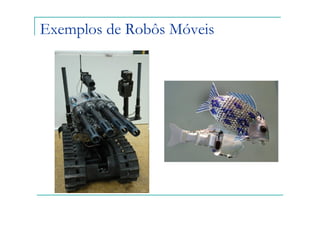
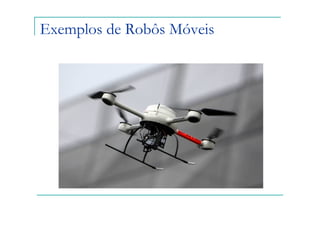

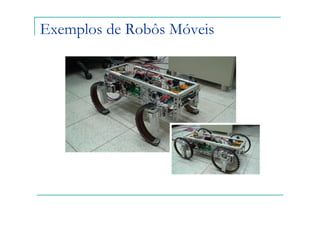















O documento introduz o conceito de robótica, abordando definições de robôs, suas classificações, como robôs manipuladores e móveis, e suas aplicações em diferentes setores, como indústria e serviços. Também discute o mercado de robôs, suas perspectivas futuras e menciona eventos e competições relevantes na área. As três leis da robótica e a evolução histórica dos robôs manipuladores são abordadas, evidenciando o avanço tecnológico e sua importância na economia.

















![Fontes de Energia [8 ano]](https://cdn.slidesharecdn.com/ss_thumbnails/energias-130827122328-phpapp01-150612150326-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)













































































