Este documento apresenta um trabalho prático sobre a cinemática direta e inversa de um braço robótico R700. Inicialmente, fornece contexto histórico sobre o desenvolvimento de robôs manipuladores e introduz os conceitos de cinemática direta e inversa. Em seguida, descreve a notação de Denavit-Hartenberg para modelar sistemas articulados e determinar as matrizes de transformação para cinemática direta e inversa do braço robótico.







![17
Nuno Martins nº 11854 – Carlos Silva nº 46421 – Tiago nº 20347 30/06/2018
Estes valores foram obtidos utilizando o seguinte código no Matlab :
% CINEMÁTICA DIRETA
syms T T1 T2 T3
Rot_Z=[cos(T1+pi) -sin(T1+pi) 0 0; sin(T1+pi) cos(T1+pi) 0 0; 0 0 1 0; 0 0 0
1];
Tra_l_d=[1 0 0 0; 0 1 0 0; 0 0 1 8; 0 0 0 1];
Rot_X=[1 0 0 0; 0 cos(pi/2) -sin(pi/2) 0; 0 sin(pi/2) cos(pi/2) 0; 0 0 0 1];
A1=Rot_Z*Tra_l_d*Rot_X
Rot_Z=[cos(T2+pi/2) -sin(T2+pi/2) 0 0; sin(T2+pi/2) cos(T2+pi/2) 0 0; 0 0 1 0;
0 0 0 1];
Tra_l_d=[1 0 0 8; 0 1 0 0; 0 0 1 0; 0 0 0 1];
Rot_X=[1 0 0 0; 0 cos(pi) -sin(pi) 0; 0 sin(pi) cos(pi) 0; 0 0 0 1];
A2=Rot_Z*Tra_l_d*Rot_X
Rot_Z=[cos(T3) -sin(T3) 0 0; sin(T3) cos(T3) 0 0; 0 0 1 0; 0 0 0 1];
Tra_l_d=[1 0 0 27; 0 1 0 0; 0 0 1 0; 0 0 0 1];
Rot_X=[1 0 0 0; 0 cos(0) -sin(0) 0; 0 sin(0) cos(0) 0; 0 0 0 1];
A3=Rot_Z*Tra_l_d*Rot_X
T_0_4=A1*A2*A3
T_0_4_2=subs(T_0_4,[T1,T2,T3],[41.6*pi/180,37.8*pi/180,-80.2*pi/180]);
T_0_4_2=double(T_0_4_2)
T_0_4_3=subs(T_0_4,[T1,T2,T3],[41.6*pi/180,68.1*pi/180,-40.8*pi/180]);
T_0_4_3=double(T_0_4_3)
T_0_4_4=subs(T_0_4,[T1,T2,T3],[13.6*pi/180,48.4*pi/180,-68.8*pi/180]);
T_0_4_4=double(T_0_4_4)
10) Cinemática Inversa:
Enquanto a cinemática direta resulta do desenvolvimento imediato das
expressões do manipulador, a cinemática inversa procura determinar o
conjunto de valores das juntas que se adequam a uma dada configuração do
espaço operacional ou cartesiano.
Figura 4 – Diagrama de blocos](https://image.slidesharecdn.com/vectorroboticarmr700-180715212005/85/Vector-robotic-arm-r700-17-320.jpg)
![18
Nuno Martins nº 11854 – Carlos Silva nº 46421 – Tiago nº 20347 30/06/2018
A cinemática inversa nem sempre é um problema com solução
analítica, ou por vezes não tem mesmo solução sendo mais complexo ainda
é o facto de não haver uma metodologia única de aplicação direta.
Não será esse um problema grave porque as soluções de interesse
prático estão já todas bem estudadas e só em casos especiais será
necessário conceber novas soluções.
Nesta parte, utilizou-se o Matlab para resolver as equações de modo
a encontrar os valores das coordenadas finais do ponto a calcular, no
entanto, para o ponto escolhido verifica-se múltiplas soluções, então foi
necessário restringir as soluções limitando os ângulos que o manipulador
pode efetuar, reduzindo assim o espaço de trabalho ao primeiro quadrante
do plano XY, conforme se pode verificar no seguinte código:
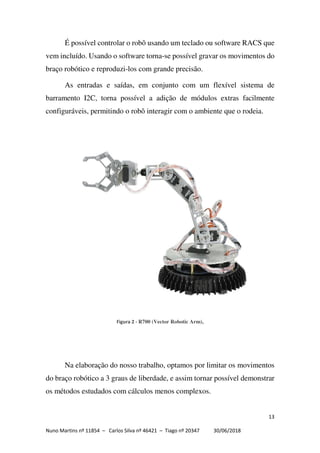
% CINEMATICA INVERSA
Px = 21.5;
Py = 19;
Pz = 1.5;
eqns = [T_0_4(1,4)== Px, T_0_4(2,4)== Py, T_0_4(3,4)== Pz];
vars = [T1,T2,T3];
range = [0 pi/2; 0 pi; -pi 0]; % Restrição da amplitude de movimento
dos motores
sol = vpasolve(eqns,vars,range);
T(1)=sol.T1;
T(2)=sol.T2;
T(3)=sol.T3;
% Conversão para graus
T=double(T)
T_deg=T*180/pi](https://image.slidesharecdn.com/vectorroboticarmr700-180715212005/85/Vector-robotic-arm-r700-18-320.jpg)