Baixado 15 vezes


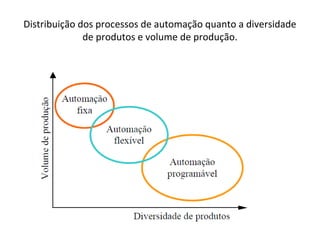

O documento discute a história e o desenvolvimento da robótica industrial. Ele explica que os robôs industriais são máquinas programáveis capazes de realizar tarefas complexas, perigosas ou repetitivas no lugar de humanos. O documento também descreve os diferentes tipos de automação industrial e como os robôs se encaixam na automação programável devido à sua capacidade de produzir volumes baixos de uma grande variedade de produtos.