1) O documento descreve a história dos robôs desde sua origem na peça de teatro de Karel Capek até os desenvolvimentos recentes.
2) Isaac Asimov popularizou o termo "robótica" e criou as Três Leis da Robótica para descrever o comportamento dos robôs.
3) Robôs industriais são agora amplamente usados para substituir seres humanos em tarefas perigosas, repetitivas ou que exigem precisão.





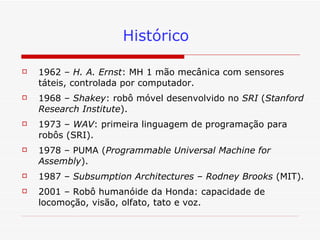







![A utilização de Robôs Cerca de 1000 robôs (20% do total) são relacionados a pequenas e médias indústrias; Setor automobilístico é o que mais utiliza robôs: FORD (Bahia): 240 robôs ABB; Volkswagen (SBC - SP): 400 robôs; Citroën (Resende - RJ): 300 robôs. População mundial de robôs: 800.000 [IFR, 2000] - Japão: 60%, Brasil: 0,63%.](https://image.slidesharecdn.com/aula2sistemasrobotizadosunia2010-12851231824212-phpapp02/85/Sistemas-Robotizados-20-320.jpg)

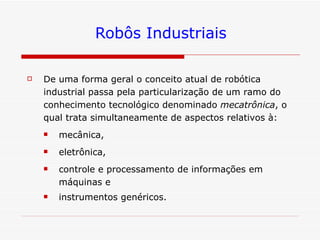
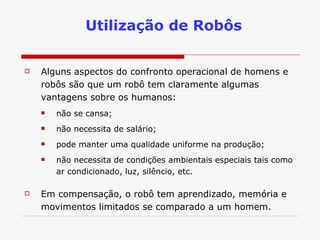
![Principais Aplicações da Robótica Distribuição de Robôs por Setores Econômicos Percentual Utilização de Robôs Industriais no Chão-de-fábrica [PAEP,1999] Setor da Indústria de Manufatura 1994 1996 Artigos de Borracha e Plásticos 0,5 0,9 Produtos Metal (exceto Máquinas e Equipamentos) 0,2 0,4 Máquinas e Equipamentos 0,4 0,4 Máquinas p/ Escritório e Equipamentos Informática 3,9 3,8 Máquinas, Aparelhos e Material Elétrico 0,6 1,6 Materiais e Aparelhos Eletrônicos; Equip. de Comunicação 1,7 3,4 Equipamentos Médicos, Ótica e Relógios; Instrumentos de Precisão; Automação Industrial 0,4 0,8 Montagem de Veículos Automotores , Reboques e Carrocerias 1,2 2,8 Outros Equipamentos de Transporte 0,5 1,0](https://image.slidesharecdn.com/aula2sistemasrobotizadosunia2010-12851231824212-phpapp02/85/Sistemas-Robotizados-23-320.jpg)
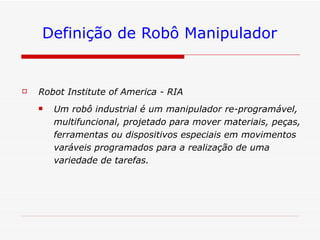
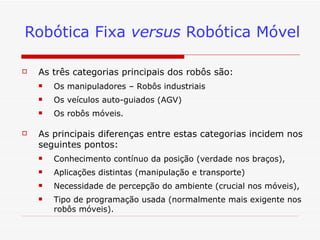
![Distribuição de Robôs por Aplicação Industrial Robôs ABB instalados no Brasil Aplicação Industrial (1250 unidades) Percentual Soldagem por pontos 33 % Soldagem a arco 18 % Manipulação / “paletização” 25 % Pintura 10 % Outros (montagem, acabamento, corte jato d’água e oxigênio) 14 % Soldagem a Arco [ABB, 2000] Aplicação (225 unidades) Percentual Indústria Automobilística 58 % Fornecedores auto-peças 23 % Indústrias em geral 19 %](https://image.slidesharecdn.com/aula2sistemasrobotizadosunia2010-12851231824212-phpapp02/85/Sistemas-Robotizados-24-320.jpg)


























![8 ficha efa stc2_3[1]_luis_moura_r[1]](https://cdn.slidesharecdn.com/ss_thumbnails/8fichaefastc231luismourar1-120412153308-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





















![Processos industriais tintas[1]](https://cdn.slidesharecdn.com/ss_thumbnails/processosindustriais-tintas1-150317161800-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)