Baixado 2.859 vezes















![Um pouco de eletrônica
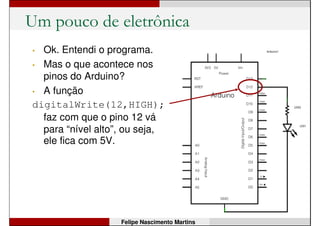
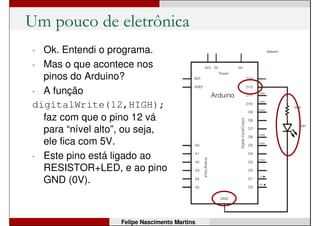
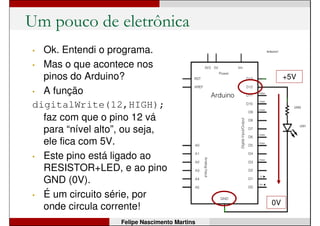
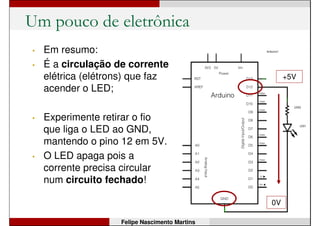
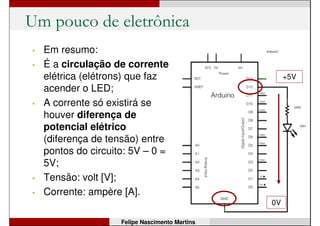
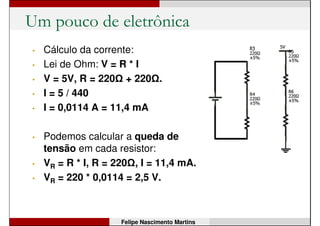
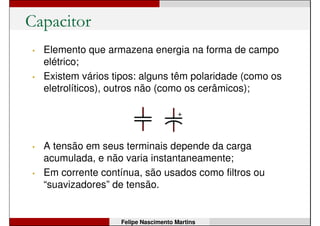
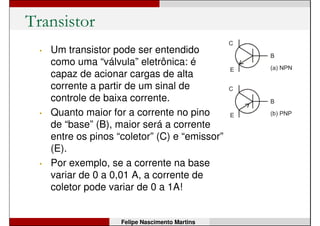
• Em resumo:
• É a circulação de corrente
elétrica (elétrons) que faz
acender o LED;
• A corrente só existirá se
houver diferença de
potencial elétrico
(diferença de tensão) entre
pontos do circuito: 5V – 0 =
5V;
• Tensão: volt [V];
• Corrente: ampère [A].
Felipe Nascimento Martins
+5V
0V](https://image.slidesharecdn.com/oficinaintroeletrnicacomarduinov1-111013213606-phpapp01/85/Mini-curso-de-Introducao-a-Eletronica-com-Arduino-54-320.jpg)
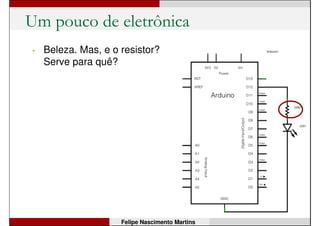
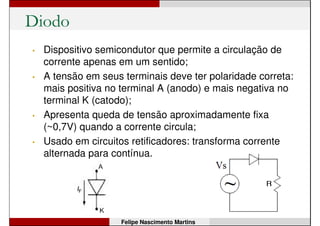
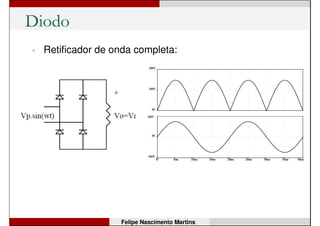









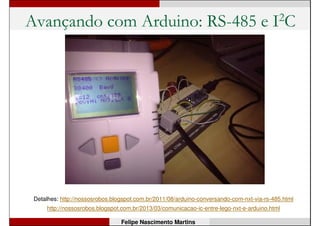
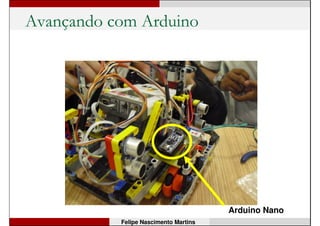









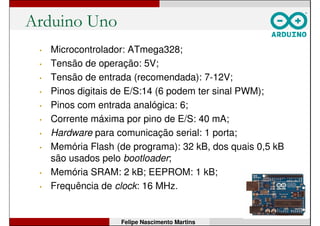
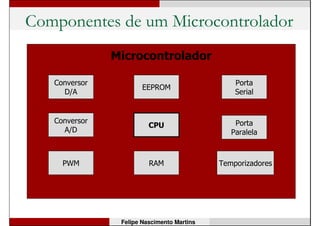
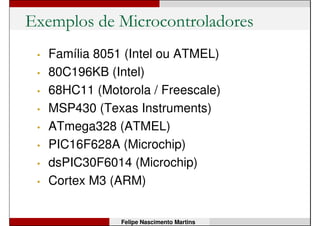
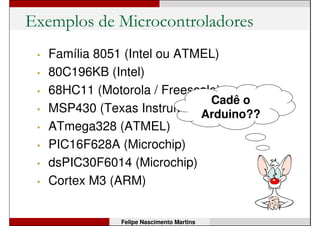
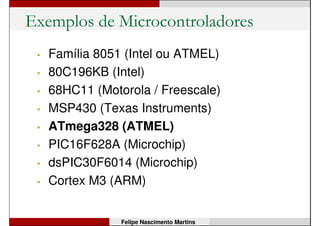
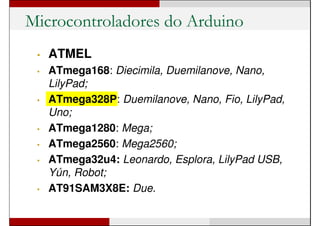
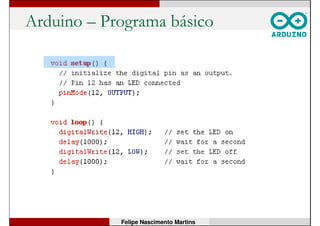
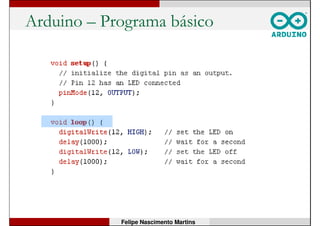
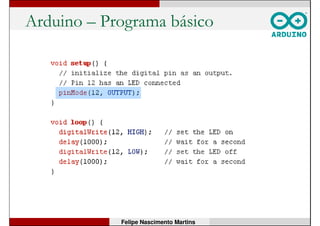
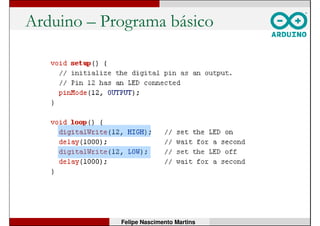
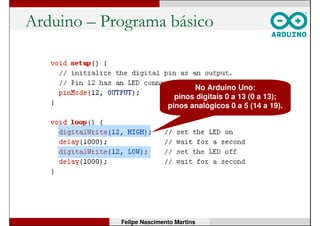
O documento apresenta uma introdução à eletrônica utilizando a plataforma Arduino, descrevendo suas características como hardware open-source e linguagem de programação baseada em C/C++. Apresenta também exemplos práticos de utilização da placa em projetos, incluindo conceitos básicos de eletrônica, microcontroladores e circuitos simples. Além disso, aborda componentes fundamentais e suas funções, como diodos e capacitores, destacando a importância da prototipagem e da experimentação na eletrônica.