O documento discute introdução à robótica, definindo o que é um robô e apresentando as três leis da robótica de Isaac Asimov. Também aborda aplicações de robôs manipuladores na indústria automobilística e de robôs na medicina.
O que éRobô?
A palavra robô vem da palavra
Tcheca robota, que significa
“trabalho forçado”, e foi usada pela
primeira vez numa peça teatral de
1920 escrita por Karel Čapek:
Rossum´s Universal Robots
(R.U.R.).
4.
As Três Leisda Robótica
1ª Lei: Um robô não pode ferir um ser humano
ou, por omissão, permitir que um ser humano
sofra algum mal;
2ª Lei: Um robô deve obedecer as ordens que
lhe sejam dadas por seres humanos, exceto
nos casos em que tais ordens entrem em
conflito com a Primeira Lei;
3ª Lei: Um robô deve proteger sua própria
existência desde que tal proteção não entre
em conflito com a Primeira ou com a
Segunda Lei.
Escritas por Isaac Asimov em seu conto “I,
Robot”.
6.
Afinal, o queé um Robô (de
verdade)?
Segundo a RIA (Associação das Indústriasde
Robótica), um Robô é um manipulador
reprogramáve, multifuncional, projetado
para movimentar material, ferramentas ou
dispositivos especializados através de
movimentos programáveis variados para
desenvolver uma variedade de tarefas
7.
Outra definição derobô:
Segundo a ISO 8373:1994, que define o
vocabulário padrão para robôs industriais,
um robô é:
Um manipulador multifuncional,
controlado automaticamente,
reprogramável, com três ou mais eixos,
que pode estar fixo em determinado local
ou ser móvel, utilizado em aplicações de
automação industrial.
8.
Felipe Nascimento Martins
RobôsManipuladores
Em geral, executam movimentação de
objetos na indústria de manufatura, pintura e
soldagem na indústria automobilística,
manuseio de objetos radioativos, etc.
Tarefas repetitivas, de precisão ou
perigosas.
Mercado de US$ 5,7 bilhões por ano!*
* Dado de 2010. Fonte: http://www.ifr.org/industrial-robots/statistics/
10.
Robôs de Serviços
Realizam serviços de utilidade aos seres humanos ou
equipamentos, excluindo-se operações de manufatura.
São robôs que auxiliam em tarefas como:
busca e resgate;
assistência doméstica (como aspiradores
de pó e cortadores de grama);
entretenimento (futebol de robôs,
robôs que se comportam como
animais de estimação); e
assistência a pessoas com
deficiência (como cadeiras de rodas
robóticas e dispositivos de auxílio ao
caminhar).
13.
Robôs de Serviços
Stanford Personal Robotics Program
http://personalrobotics.stanford.edu/
14.
Mercado de Robôs
Levando-se em consideração apenas
aplicações profissionais (não
domésticas), robôs de serviço já
formam um mercado de mais de
US$3,2 bilhões.
7% do valor referem-se a unidades
para aplicações médicas;
• 75% refere-se à área de defesa!
Fonte: http://www.ifr.org/service-robots/statistics/
15.
Mercado de Robôs
Considerando aplicações domésticas e
pessoais (robôs aspiradores, cortadores
de grama, de entretenimento,
educacionais e de pesquisa), somente
em 2010 foram vendidas 2,2 milhões de
unidades.
Mercado de US$ 540 milhões.
Previsão: 2011~2014: venda de
14,4 milhões de unidades apenas
para uso pessoal!
Fonte: http://www.ifr.o
• rg/service-robots/statistics/
16.
Mercado de Robôs
Atualmente (2011) a
quantidade de robôs industriais
é de cerca de 1,1 milhão de
unidades.
Mas...
17.
Mercado de Robôs
Apenasa empresa Foxconn,
maior fabricante terceirizada
de eletrônicos do mundo,
pretende aumentar o número
de robôs em suas fábricas de
10 mil para um milhão até
2014!
Felipe Nascimento Martins
18.
Mercado de Robôs
•Estamos na economia do conhecimento e
parece que os únicos trabalhos que vão
"sobrar" para humanos, no médio e longo
prazos, são aqueles nos quais é preciso
exercitar funções essencialmente
humanas: pensar, imaginar, perguntar,
descobrir, criar, resolver, desenhar,
projetar… coisas que robôs ainda vão
demorar muito tempo pra começar a fazer.
• Silvio Meira
19.
Mercado de Robôs
Estudo da União Européia estima que
o mercado de robôs será de aprox. 100
bilhões de euros por ano até 2020!
A Europa está preparando projeto de
Parceria Público-Privada para 2013, com
objetivo de investir na área de robótica para
aumentar os empregos;
Hoje a Europa produz um quarto dos robôs
industriais e metade dos robôs de serviço
do mundo.
Fonte:http://europa.eu/rapid/pressReleasesAction.do?reference=IP/12/978&format=HTML&aged=
0&language=PT&guiLanguage=en
20.
Mercado de Robôs
Estudoda União Européia estima que
o mercado de robôs será de aprox. 100
bilhões de euros por ano até 2020!
Hoje a Europa produz um quarto dos
robôs industriais e metade dos robôs
de serviço do mundo.
Fonte:http://europa.eu/rapid/pressReleasesAction.do?reference=IP/12/978&format=HTML&aged=
0&language=PT&guiLanguage=en
História
O primeirorobô manipulador
industrial foi projetado por George
Devol em 1954.
Em 1956, Devol e Joseph Engelberger
fundaram a Unimation, a primeira
empresa de robótica do mundo.
Em 1962 o primeiro robô industrial, o
UNIMATE, começa a funcionar numa
fábrica da GM nos EUA.
História
Em 1969foi construído o
primeiro manipulador com
6 graus de liberdade
acionado por motores
elétricos: Stanford Arm.
Felipe Nascimento Martins
25.
História
1ª geração:Não possuem sensores.
Baixo poder de computação;
2ª geração: Processamento de
sensores em malha fechada com
razoável poder computacional;
3ª geração: Sensores mais complexos e
poder computacional muito mais elevado.
Muitos usam algoritmos de Inteligência
Artificial na tomada de decisões.
26.
História
ABB: primeiraa ter
um robô comercial
100% elétrico
controlado por
microprocessador, em
1973: IRB6.
Foi a primeira a
vender 100 mil
unidades de robôs
industriais, em 2003.
27.
Mercado
Alguns fabricantes
importantesde robôs
manipuladores:
• ABB – fusão da sueca Asea
com a suíça Brown Boveri;
• Adept – EUA;
• FANUC – EUA/Japão;
• Kawasaki Robotics – Japão
• Kuka – Alemanha;
• Stäubli Robotics – Suíça
;
28.
Estruturas de Robôs
Manipuladores
As juntas de um manipulador podem ser:
Prismáticas - P;
Rotativas - R;
Considerando apenas as três primeiras
juntas a partir da base do robô (os três
primeiros graus de liberdade), várias
estruturas podem ser formadas;
Cada estrutura resulta em diferentes
características para o robô, influenciando
principalmente em seu volume de trabalho
• .
Robô Móvel
Muitosdos robôs de serviço são Robôs Móveis.
Mas, o que é um Robô Móvel?
Um robô manipulador não se move? Então, não é
“móvel”?
36.
Robô Móvel
Umrobô móvel pode deslocar-se:
no solo, através de rodas, esteiras, patas,
etc.;
no ar, como um helicóptero, avião ou balão;
na água, como um navio ou submarino;
ou no espaço!
É definido como um veículo capaz de
movimentação autônoma, equipado com
atuadores controlados por um
computador embarcado.
37.
Robô Móvel
Umrobô móvel pode deslocar-se:
no solo, através de rodas, esteiras, patas,
etc.;
no ar, como um helicóptero, avião ou balão;
na água, como um navio ou submarino;
ou no espaço!
É definido como um veículo capaz de
movimentação autônoma, equipado
com controlados por um computador
atuadores embarcado
38.
Felipe Nascimento Martins
•O primeiro robô
móvel construído e
reconhecido na
bibliografia é o
Shakey,
desenvolvido pelo
Stanford Research
Institute, em 1967.
História
Fonte: http://www.ai.sri.com/shakey/images.php
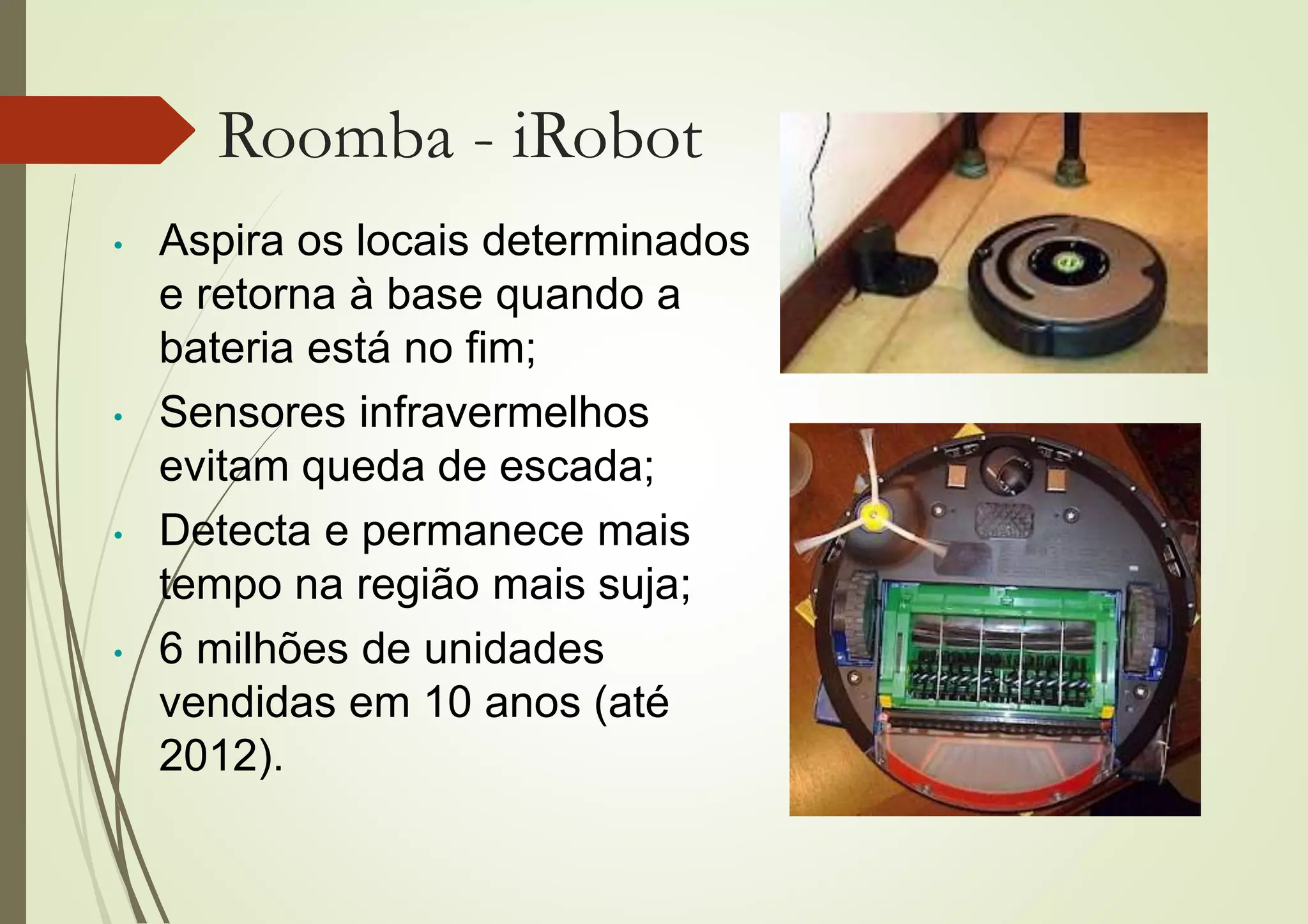
Roomba - iRobot
•Aspira os locais determinados
e retorna à base quando a
bateria está no fim;
• Sensores infravermelhos
evitam queda de escada;
• Detecta e permanece mais
tempo na região mais suja;
• 6 milhões de unidades
vendidas em 10 anos (até
2012).
Manipulador Móvel
Umrobô móvel que possui um manipulador a bordo
chama-se Manipulador Móvel;
O conjunto é considerado como um sistema
multirrobôs, pois seu controle deve ser coordenado
para realização da tarefa designada.
Veículos Autônomos
Váriasempresas e instituições trabalham no desenvolvimento de
veículos autônomos;
O projeto mais avançado é da Google: mais de 300.000 milhas em
modo autônomo!
RoboCup
Promove anualmenteo maior e mais
importante evento sobre robôs autônomos e
inteligentes;
Iniciativa internacional para promover
educação, pesquisa e desenvolvimento em
robótica e IA;
Ideia nasceu no Japão em 1992;
Primeira edição: Nagoya, 1997 - ~40 times;
https://www.youtube.com/watch?v=4_BWQl9
1p9Y
60.
Olimpíada Brasileira de
Robótica
É uma das olimpíadas científicas
brasileiras apoiadas pelo CNPq;
Iniciativa pública, gratuita, sem fins lucrativos;
Visa estimular jovens às carreiras científico-
tecnológicas e promover atualizações no
processo de ensino-aprendizagem brasileiro;
Ensino fundamental, médio e técnico;
Primeira edição: 2007, com 5.000 participantes;
2019: mais de 200 Mil alunos participaram.
ROBÔS NA INDÚSTRIA
Aindústria que mais usa manipuladores industriais, ou braços robóticos,como são
também chamados, é a indústria automóvel.
Isso inclui as indústrias montadoras de veículos assim como também as indústrias
de auto-peças
Nestas indústrias os robôs podem fazer tarefas como:
• apertar parafusos,
• soldar,
• pintar,
• moldar,
• forjar,
• cortar,
• perfurar,
• transportar peças de um lado para outro, etc.
Outra indústria que usam robôs de forma semelhante é a de eletrodomésticos
65.
ROBÔS NA MEDICINA
No campo da medicina e na área da saúde encontramos robôs de
diversas formas:
• robôs de apoio à idosos e deficiente como cadeira de rodas
automatizadas;
• robôs membros artificiais;
• robôs órgãos artificiais;
• robôs que participam em cirurgias;
Robôs cadeira de rodas
Evidentemente não é qualquer cadeira de rodas que pode ser
considerada um om características que a tornam um robô. Entretanto há
cadeiras de rodas com características que o tornam um autentico
robô
A cadeira de rodas robotizada Wheelesle criada pelo MIT,
Massachusetts Institute of Technology nos Estados unidos para pessoas
deficientes
s, co
67.
Robôs membros artificiais
não é qualquer prótese que substitua um ou mais membros que
é considerada um robô
ela deve ter mecanismos robóticos com sensores e atuadores,
ser automatizada e ter um sistema de realimentação (feedback)
uma prótese robótica substitui acima de tudo os músculos (dos
braços, das mãos ou das pernas) obedecendo comandos do
seu utilizador deficiente
68.
Edinburgh Modular ArmSystem (EDMS) exemplos de membros artificiais
robóticos. Médicos e engenheiros trabalhando juntos desenvolveram uma prótese
para os membros superiores que usam mecanismos robóticos
69.
Robôs órgãos artificiais
Não são apenas para os membros que constroem próteses robóticas
Existem também órgãos artificiais que funcionam automatizados e por isso
também considerados artefatos robóticos
Só para mencionar alguns: o coração, os pulmões, os rins, o
estômago, o pâncreas, o fígado.
O primeiro coração
artificial, construído no
Texas, EUA, em 1981
70.
Alguns destes órgãosartificiais não precisam ser colocados dentro do corpo
do paciente para funcionarem como um substituto do órgão original do
paciente
é o caso dos pulmões ou mesmo dos rins artificiais (tratamentos de hemodiálises)
71.
Robô Cirurgião
A Robóticatem aumentado suas aplicações na cirurgia
Robôs já foram usados em diversas cirurgias médicas no coração, nas artérias,
no estômago, na bexiga, nos rins, na próstata e até no cérebro
Portanto robôs cirurgiões são hoje usados pelos médicos para auxiliarem em
algumas operações delicadas e que precisam de muita exatidão
Robôs sociais sãorobôs projetados para interagir com os humanos
Muitos destes robôs sociais são humanóides e tentam imitar alguns aspectos
humanos e desta forma interagir conosco
robôs que jogam futebol, que dançam, que tocam instrumentos, que conversam
conosco e até robôs que demonstram algumas emoções semelhantes às nossas
AIBO - sony ASIMO - honda