Transferir como PDF, PPTX











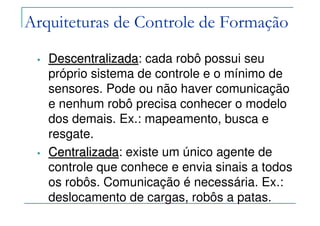
![Felipe Nascimento Martins
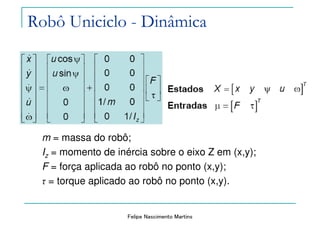
( ) ( ) ][2221 srkrkIrmR
k
R
PTDTet
a
a
++=θ
( )( ) ( ) ][222 22
2 srdkrdkmbIrRdI
k
R
PRDRzte
a
a
+++=θ
]/[
2
2
3 radsm
k
mbR
k
R
PT
t
a
a
=θ
( )
]1[1
1
4 +
+=
PT
e
a
ba
a
a
rk
B
R
kk
k
R
θ
]/[5 ms
dk
mbR
k
R
PR
t
a
a
=θ ]1[1
2
6 +
+=
PR
e
a
ba
a
a
rk
d
B
R
kk
k
R
θ
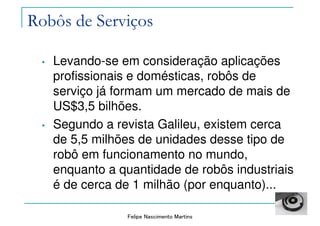
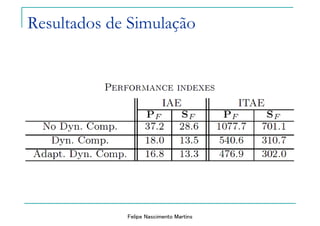
Parâmetros do Modelo Dinâmico](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-66-320.jpg)

![Felipe Nascimento Martins
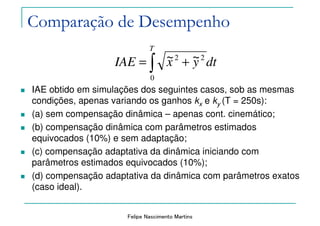
Parameter
Updating
x
y
ψrefω
refu
Robot
θ
&ˆ
u
ω
du
dω
]ˆ[θ
Dynamic
Compensation
Kinematic
Controller
dω
u~
s
s
ω~
du
du&
dω&
du
dω
+
−
+
−
ω
u
dv
rv
v
v
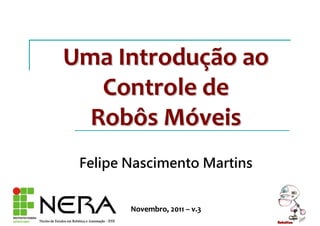
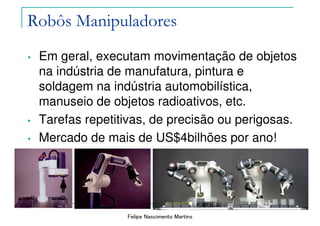
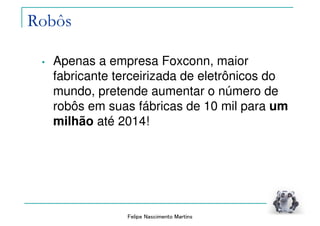
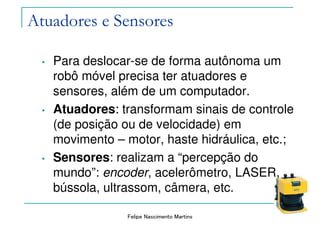
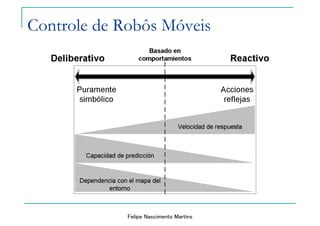
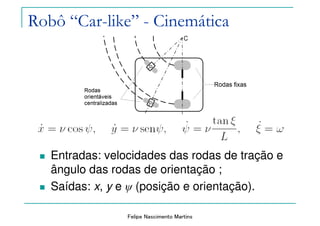
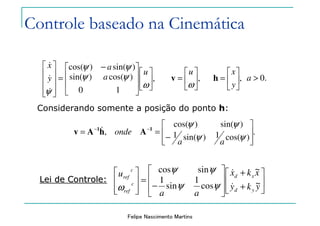
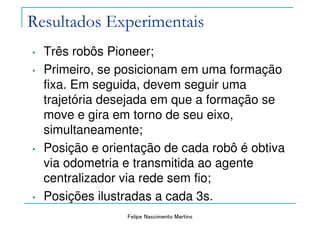
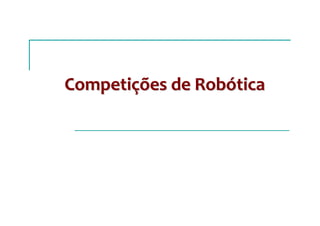
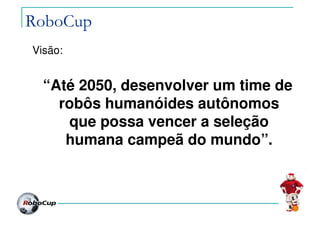
Compensação Adaptativa da Dinâmica](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-70-320.jpg)
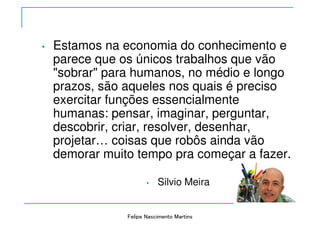
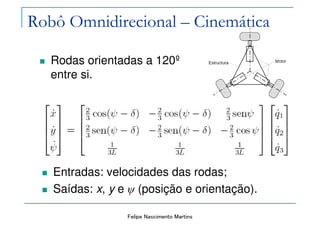
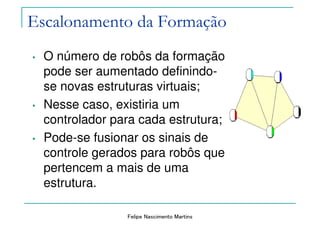
![Felipe Nascimento Martins
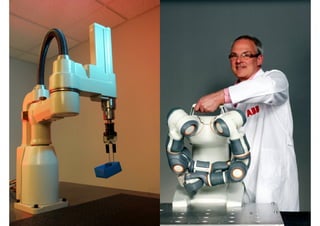
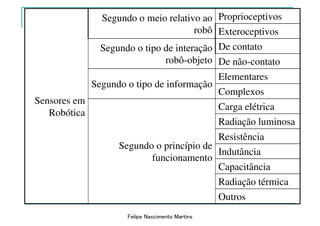
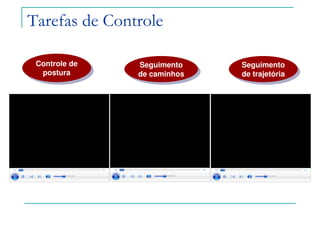
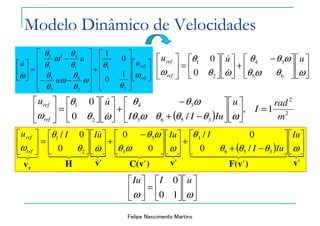
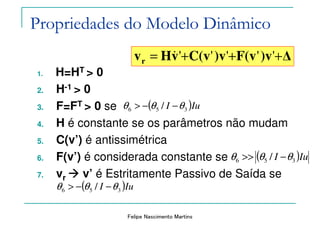
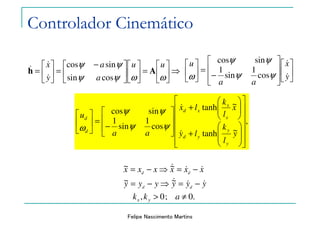
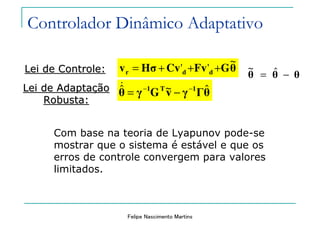
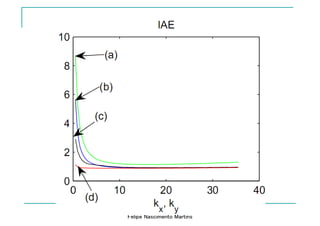
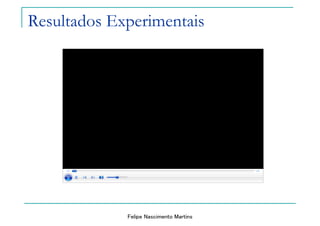
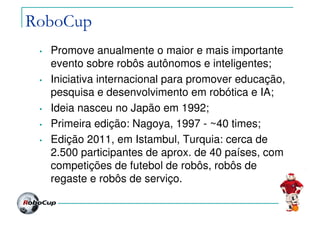
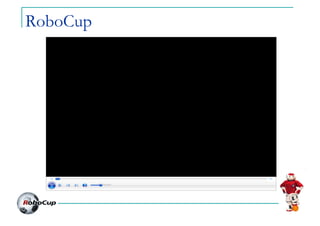
Modelo Dinâmico:
Controlador Dinâmico Adaptativo
''''' )vF(v)vC(vvHvr ++= &
[ ]T
ref
ref
u
uuu
654321
2
,
000
000
θθθθθθ
ωωω
ω
ω
=
−
=
θθ
&
&
Parametrização Linear:
θG'vr =
{ {
( ) {
''
/0
0/
''
0
0
'
0
0/
356
4
3
3
2
1
v)F(vv)C(vvHvr
−+
+
−
+
=
ωθθθ
θ
ωωθ
ωθ
ωθ
θ
ω
Iu
IuI
IIuuIIu
ref
ref
4444 34444 2144 344 21
&
&
&
43421321](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-72-320.jpg)
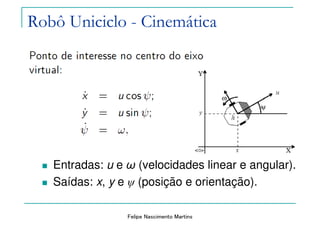
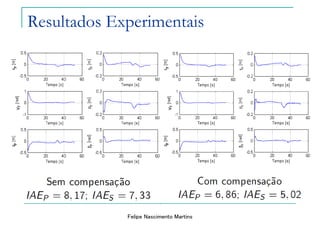
![Felipe Nascimento Martins
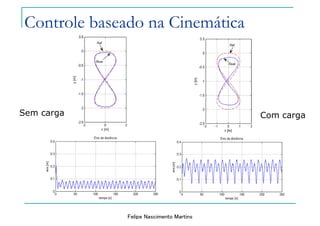
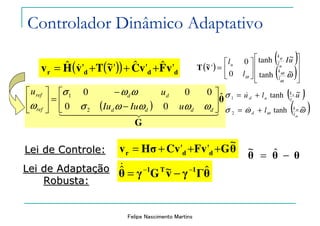
0 50 100 150 200 250
0
0.2
0.4
0.6
0.8
1
1.2
1.4
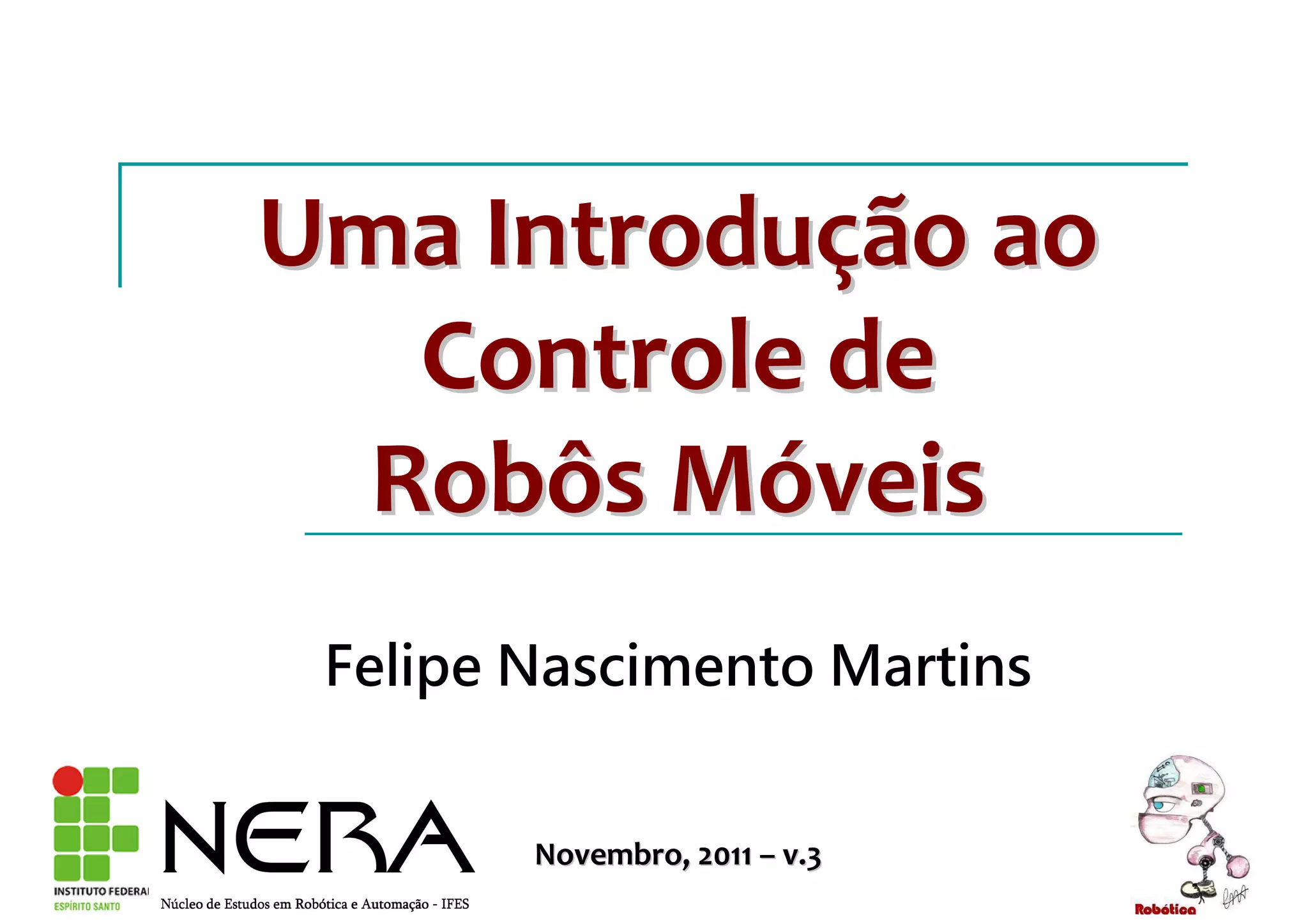
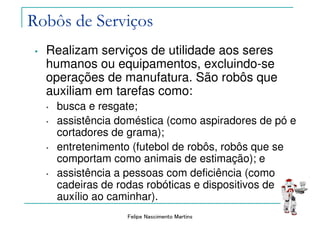
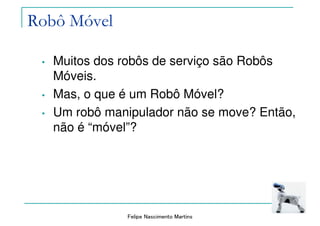
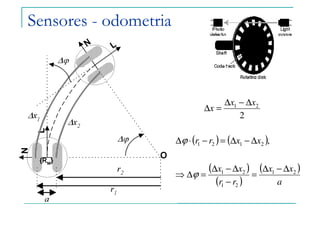
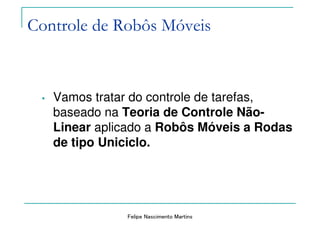
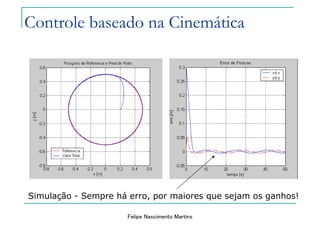
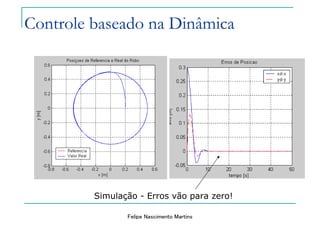
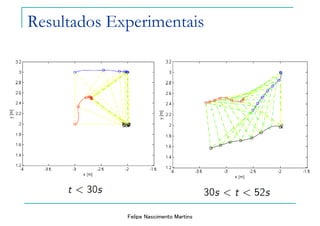
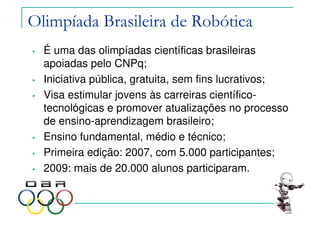
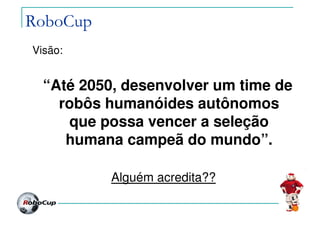
Erro de distancia
tempo [s]
erro[m]
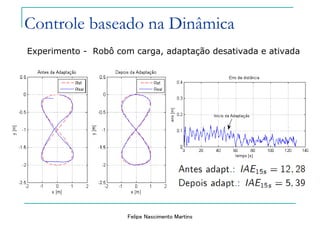
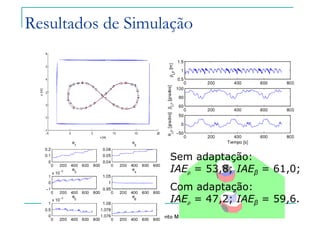
Com adaptação
Sem
adaptação
Controle baseado na Dinâmica](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-78-320.jpg)
![Felipe Nascimento Martins
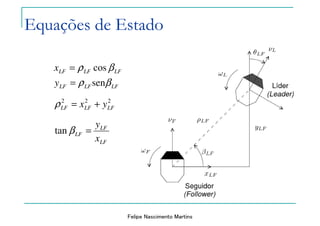
LFLFLF
LFLFLF
y
x
βρ
βρ
sen
cos
=
=
FLFFLFLFLLF
LFFLFLFLLF
y
x
υβωρθυ
βωρθυ
−−=
+−=
coscos
sensen
&
&
222
LFLFLF yx +=ρ
dt
d
LF
LF
LF
x
y
=βtan
dt
d
dt
d
LFFLFLFLLF βυθβυρ sen)(sen −−=&
[ ] FLFFLFLFL
LF
LF ωβυθβυ
ρ
β −−−= cos)cos(
1&
dt
d
FLLF ωωθ −=&
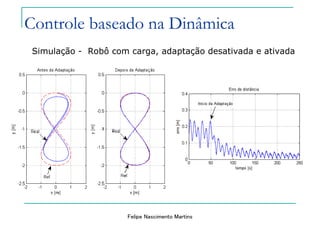
Equações de Estado](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-91-320.jpg)
![Felipe Nascimento Martins
o Lei de Controle (cinemática inversa):
o Em malha fechada:
o Análise de Estabilidade por Lyapunov mostra que o sistema é estável
e que os erros de controle convergem a zero.
)()( xvxx d qg +=&
−
−
+
−−
−
=
LF
LFLFL
LFLFL
F
F
LF
LF
LF
LF
LF
ρ
θβυ
θβυ
ω
υ
ρ
β
β
β
ρ
)cos(
)(sen
1
cos
0sen
&
&
[ ]
=−+= −
LF
LF
qfg
β
ρ
~
~
~onde,)()~()(1
xxxKxxv dd
&
0xKx =+ )~(~ f&
Controlador de Formação](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-92-320.jpg)
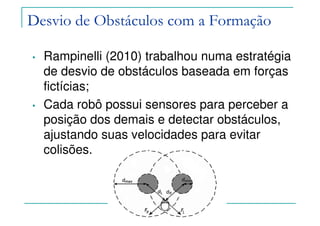
![Felipe Nascimento Martins
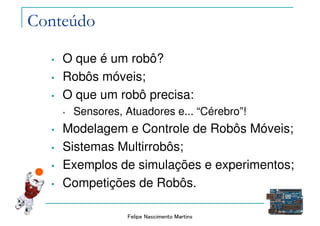
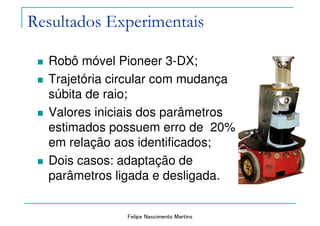
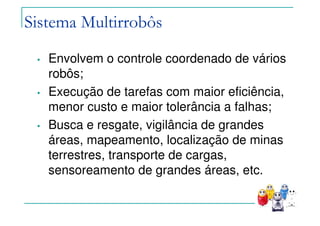
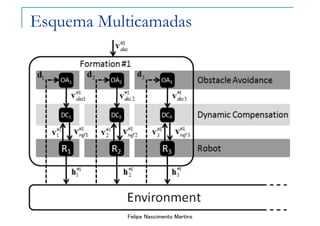
Variáveis de Formação
Baseadas na proposta
de Mas (2008) para 3
robôs;
Posição do centróide
(xF,yF) e orientação ψF
da estrutura virtual -
pose: PF = [xF yF ψF]
Formato da estrutura
virtual: SF = [pF qF βF]
Formação: q = [PF SF]T](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-103-320.jpg)
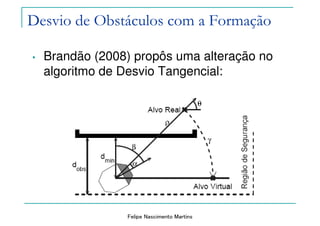
![Felipe Nascimento Martins
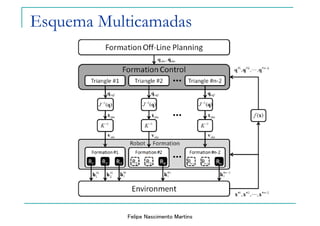
Camada de Controle de Formação
Controle Centralizado;
q = [PF SF]T;
x = [h1 h2 h3]T;
Transformação cinemática
da formação:
( )xq f=
( )qx 1−
= J&](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-104-320.jpg)
![Felipe Nascimento Martins
[ ] [ ] .;
T
FdFd
T
FdFd SPqSPq desdes
&&& ==
Das camadas de planejamento:
Controle de Formação gera:
.~,~ qqqqκqq desdesref −=+= &&
[ ] .
T
FrFr SPqref
&&& =
Camada de Controle de Formação
Com base na teoria de Lyapunov pode-se mostrar que o
sistema é estável e que os erros de controle de formação
tendem a valores limitados.](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-105-320.jpg)



![Referências
BEKEY, G.; YUH, J. The Status of Robotics. Report on the WTEC International Study:
Part II. IEEE Robotics and Automation Magazine, v. 15, n. 1, p. 80–86, 2008.
BRANDÃO, A. S. Controle Descentralizado com Desvio de Obstáculos para uma
Formação Líder-Seguidor de Robôs Móveis. Dissertação (Mestrado) — Universidade
Federal do Espírito Santo, Vitória, ES, Março 2008.
BRANDÃO, A. S. et al. MRSiM: Un Ambiente Gráfico para Simulación de Navegación de
Robots Móviles. In: Jornadas Argentinas de Robótica - JAR08. Bahía Blanca, Argentina:
[s.n.], 2008.
De La CRUZ, C.; CARELLI, R. Dynamic modeling and centralized formation control of
mobile robots. In: 32nd IEEE Conference on Industrial Electronics. [S.l.: s.n.], 2006. p.
3880–3885.
MARTINS, F. N. et al. Dynamic Modeling and Adaptive Dynamic Compensation for
Unicycle-Like Mobile Robots. 14th International Conference on Advanced Robotics - ICAR
2009, Munique, Alemanha, 22 a 26 de Junho 2009.
RAMPINELLI, V. T. L. et al. A Multi-Layer Control Scheme for Multi-Robot Formations
with Obstacle Avoidance. 14th International Conference on Advanced Robotics – ICAR
2009, Munique, Alemanha, 22 a 26 de Junho 2009.
SECCHI, H. Una Introducción a los Robots Móviles. Monografia premiada no concurso da
Associação Argentina de Controle Automático – AADECA, 2008.](https://image.slidesharecdn.com/roboticamovelv2-111106090810-phpapp01/85/Introducao-ao-Controle-de-Robos-Moveis-140-320.jpg)


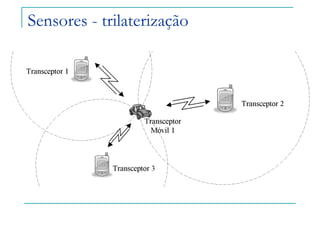
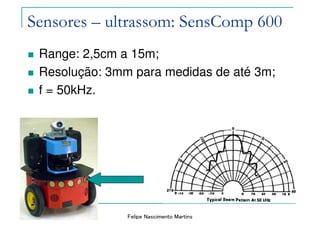
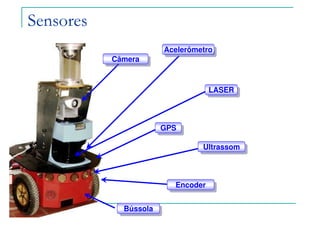
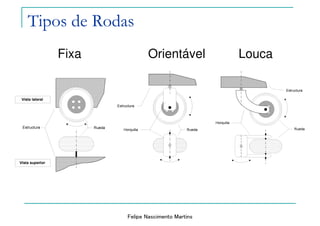
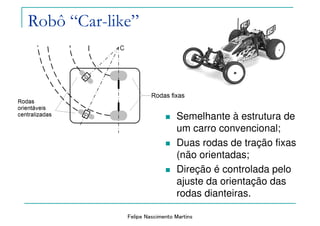
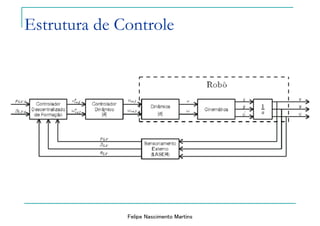
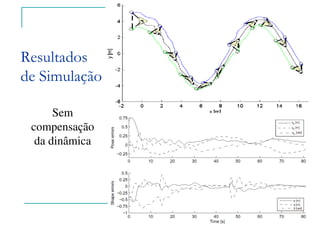
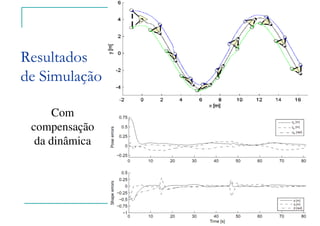
O documento fornece uma introdução sobre robôs móveis, descrevendo: 1) o que são robôs móveis e suas aplicações; 2) os principais componentes necessários para um robô móvel, incluindo sensores, atuadores e sistema de controle; 3) técnicas de modelagem e controle de robôs móveis.