Este documento apresenta uma introdução básica sobre Arduino, abordando:
1) O que é Arduino, explicando que se trata de uma plataforma de prototipagem eletrônica open-source que combina hardware e software;
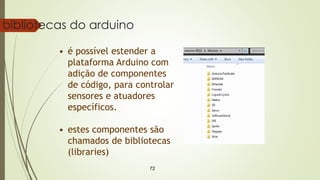
2) As partes principais do Arduino, incluindo hardware como microcontrolador, conexões digitais e analógicas, e software como a linguagem de programação baseada em C/C++;
3) Componentes eletrônicos populares para projetos com Arduino, como sensores, motores e resistores.

















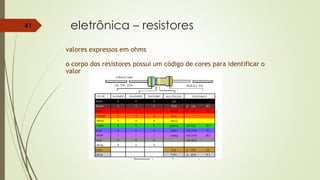
![Eletrônica – Resistores40
oferecem resistência à passagem da corrente elétrica
transformam energia elétrica em energia térmica
[pode ser usado como atuador]
tipos:
carvão [carbono]
filme
fio
resistência:
fixo
variável](https://image.slidesharecdn.com/aulabasicaarduino1-140719124308-phpapp02/85/Aula-basica-Arduino-40-320.jpg)