Transferir como PDF, PPTX




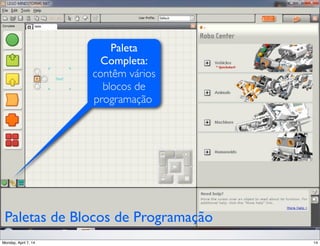
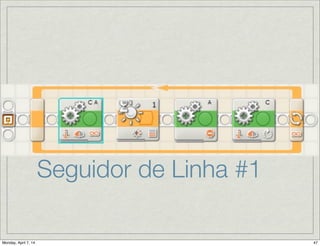
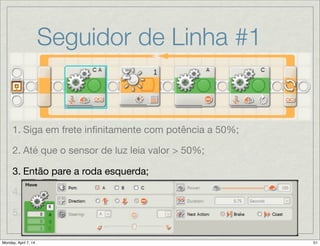
![Programando...
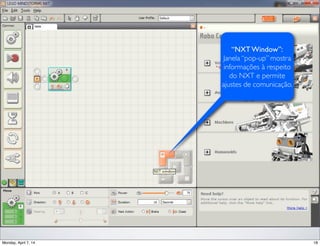
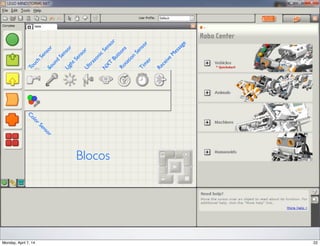
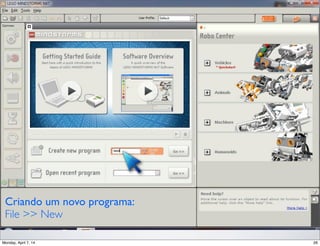
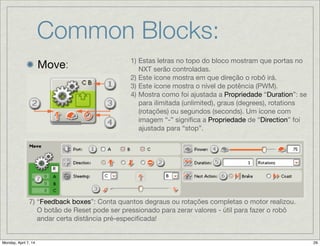
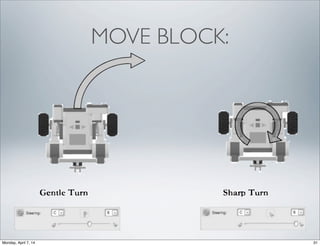
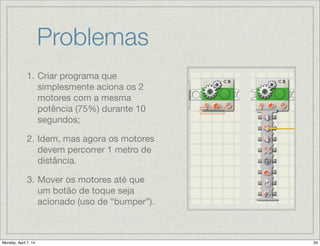
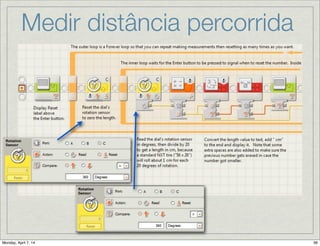
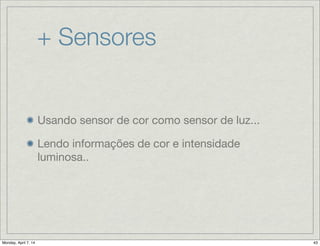
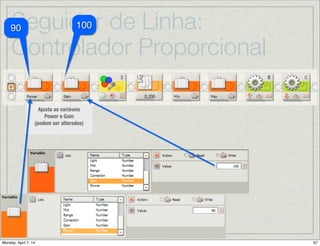
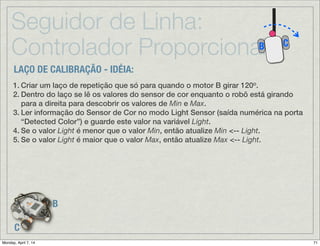
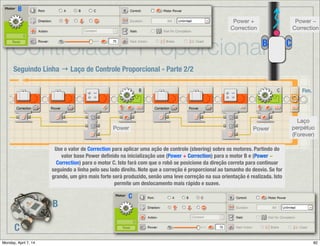
Exemplo Válido?
Programador: SPOT, ande
para frente e pare.
[SPOT: apenas fica parado]
Que aconteceu?
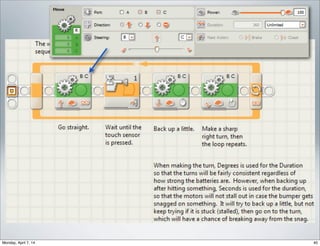
Se alguém pedisse que você
“ande um pouco e pare”,
quão longe você iria?
Quando você iria parar?
Máquinas: indicar com
precisão o que deve ser](https://image.slidesharecdn.com/programalegonxtg-140411230235-phpapp01/85/Programacao-de-Kits-Lego-NXT-usando-Linguagem-Grafica-Nativa-ou-NXT-G-7-320.jpg)
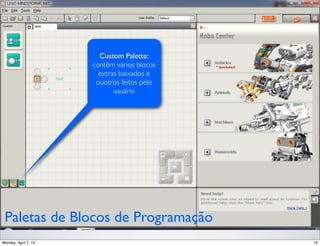
![Programando (2)...
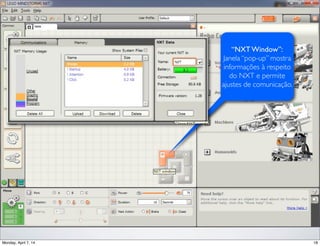
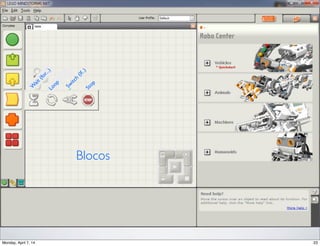
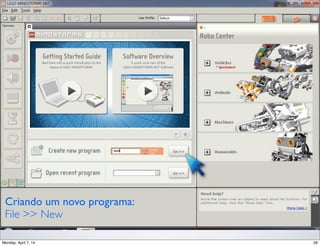
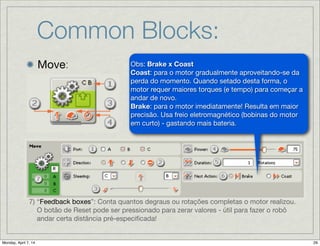
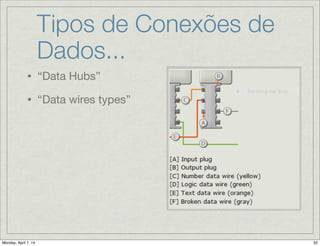
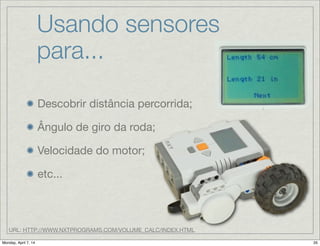
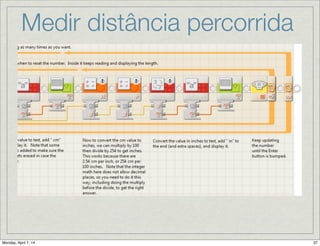
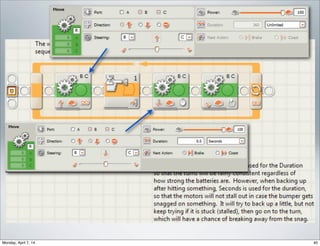
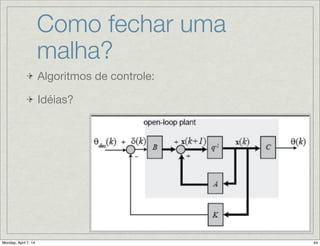
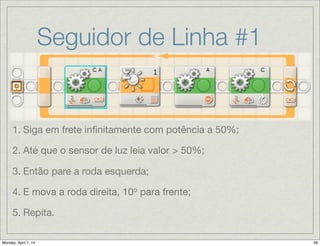
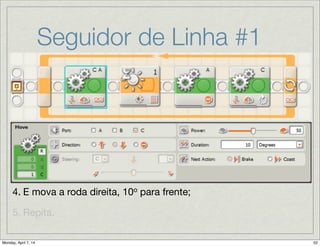
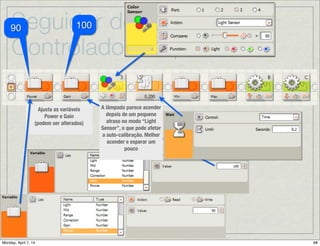
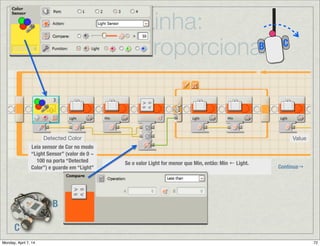
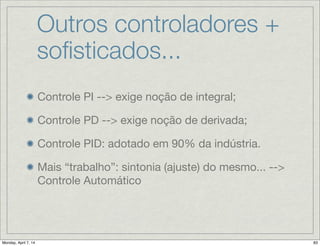
Exemplo Válido:
Programador: SPOT, ande
para frente 5 segundos e
pare.
[SPOT: se move para frente
durante 5 segundos e para.]
Programador: SPOT, gire 180
graus e então ande até meus
pés.
[SPOT: ?]
1o-caso: note são algumas
instruções: andar para frente,
esperar os 5 segundos, parar.
(São diferentes, simples e
pequenos programas
intercalados).
2o-caso: Girar 180o
no
sentido horário ou anti-
horário? Outro problema:
“pés”?](https://image.slidesharecdn.com/programalegonxtg-140411230235-phpapp01/85/Programacao-de-Kits-Lego-NXT-usando-Linguagem-Grafica-Nativa-ou-NXT-G-8-320.jpg)

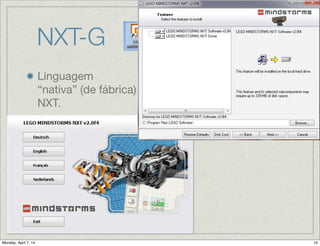


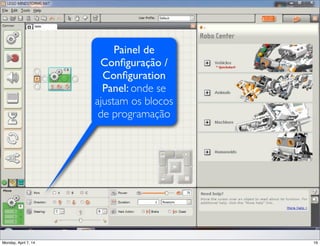
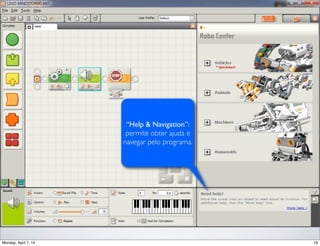

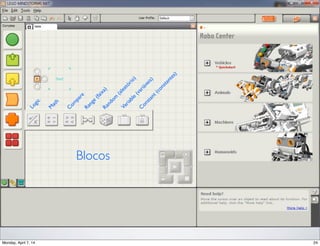
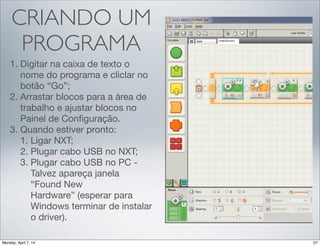
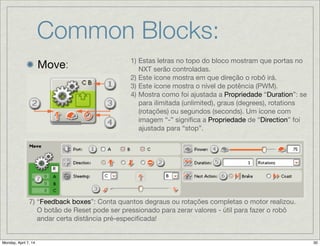
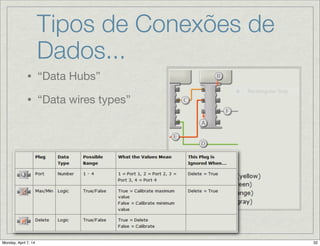
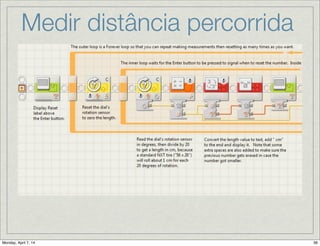
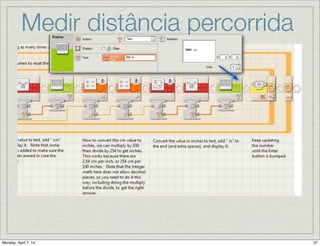


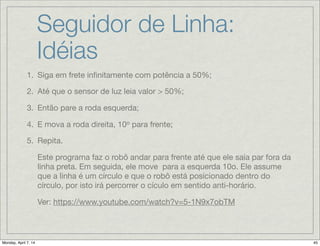

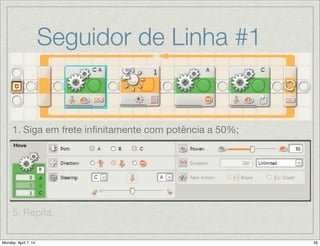
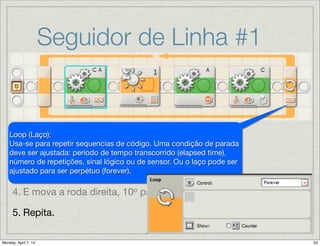


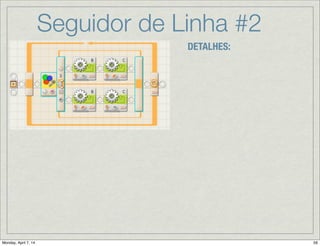







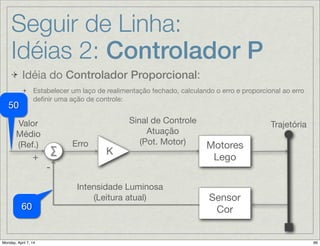
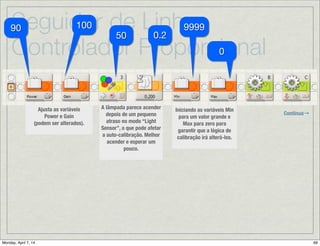
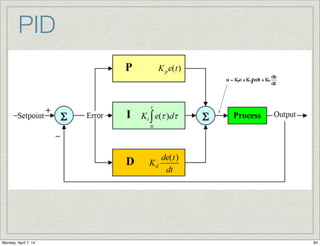
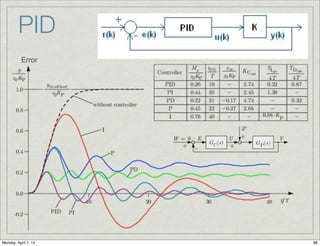
![PID Digital:
ControlTask+
y=lectura_sensor();+
e=r5y;+
//+Ley+de+control+
p0=Kp*(1+Kd/Ts);+
p1=Kp*(1+2*Kd/Ts5Ki*Ts);+
p2=(Kp*Kd)/Ts;+
u=ua1+p0*e+p1*ea1+p2*ea2;+
//+Salida+para+sistema+
Robot.motor1=u;+
//+Actualizando+variables+próximo+ciclo+
ua2=ua1;+
ua1=u;+
ea2=ea1;+
ea1=e;+
ya2=ya1;+
ya1=y;+
//+return+
!+samplingTimeControl+[ms]+
( ) ( )!
"
#
−+−−%
&
'
++−−+−= ]2[]1[2][][]1[][]1[][ kekeke
T
T
ke
T
T
kekeKkuku
s
d
i
s
c](https://image.slidesharecdn.com/programalegonxtg-140411230235-phpapp01/85/Programacao-de-Kits-Lego-NXT-usando-Linguagem-Grafica-Nativa-ou-NXT-G-110-320.jpg)
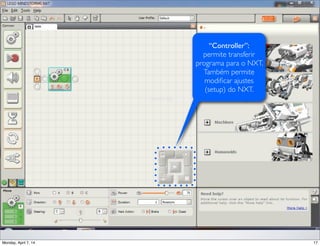
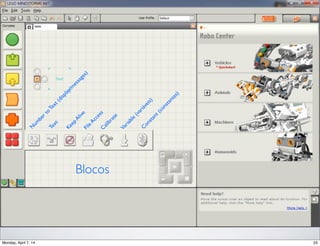
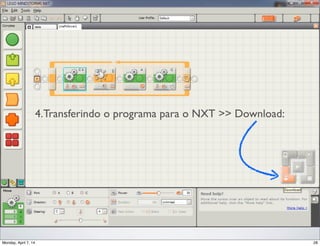
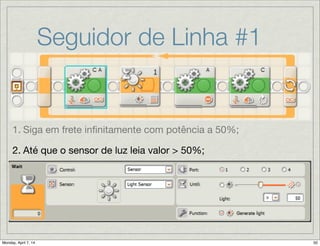
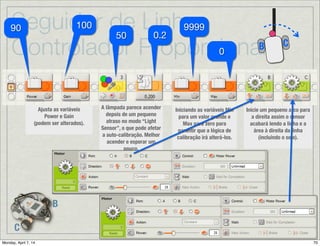
![RTOS for Lego NXT:
NxtOSEK
nxtOSEK [ h6p://lejos-osek.sourceforge.net/ ]
2007-2008 Takashi Chikamasa
nxtOSEK/JSP
ANSI C/C++ with OSEK/μITRON RTOS for LEGO® MINDSTORMS® NXT
nxtOSEK is an open source firmware for LEGO MINDSTORMS NXT. nxtOSEK consists of device
driver of leJOS NXJ C/Assembly source code, TOPPERS OSEK Real-Time Opera[ng System
source code that includes ARM7 (ATMEL AT91SAM7S256) specific por[ng part, and glue code
to make them work together. nxtOSEK can provide: ANSI C/C++ programming environment by
using GCC tool chain C API for NXT Sensors, Motor, and other devices C++ API for NXT...
nxtOSEK applica[on videos:
[h6p://lejos-osek.sourceforge.net/videos.htm ]:
NXT SCARA [h6p://lejos-osek.sourceforge.net/videos.htm#NXT_SCARA ]
Real-Time Operation System](https://image.slidesharecdn.com/programalegonxtg-140411230235-phpapp01/85/Programacao-de-Kits-Lego-NXT-usando-Linguagem-Grafica-Nativa-ou-NXT-G-111-320.jpg)
![RTOS for Lego NXT:
NxtOSEK
nxtOSEK [ h6p://lejos-osek.sourceforge.net/ ]
2007-2008 Takashi Chikamasa
nxtOSEK/JSP
ANSI C/C++ with OSEK/μITRON RTOS for LEGO® MINDSTORMS® NXT
nxtOSEK is an open source firmware for LEGO MINDSTORMS NXT. nxtOSEK consists of device
driver of leJOS NXJ C/Assembly source code, TOPPERS OSEK Real-Time Opera[ng System
source code that includes ARM7 (ATMEL AT91SAM7S256) specific por[ng part, and glue code
to make them work together. nxtOSEK can provide: ANSI C/C++ programming environment by
using GCC tool chain C API for NXT Sensors, Motor, and other devices C++ API for NXT...
nxtOSEK applica[on videos:
[h6p://lejos-osek.sourceforge.net/videos.htm ]:
NXT SCARA [h6p://lejos-osek.sourceforge.net/videos.htm#NXT_SCARA ]
Real-Time Operation System](https://image.slidesharecdn.com/programalegonxtg-140411230235-phpapp01/85/Programacao-de-Kits-Lego-NXT-usando-Linguagem-Grafica-Nativa-ou-NXT-G-112-320.jpg)

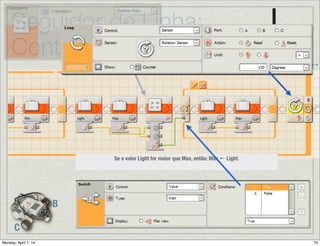
O documento discute a linguagem de programação NXT-G para o Lego Mindstorms NXT. Em três frases: A nova versão da linguagem NXT-G suporta cálculos com números decimais. Vários blocos de programação são discutidos, incluindo blocos de movimento e sensores. Programas devem fornecer instruções específicas para as máquinas executarem corretamente.















































![Story Lab - Sensor Journalism [23-04-2015, Liège]](https://cdn.slidesharecdn.com/ss_thumbnails/storylab-2015-04-23-150423042135-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)



























































