
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Destaque
Destaque (20)
Semelhante a Principio básico de funcionamento sensor de estacionamento Ibertec
Semelhante a Principio básico de funcionamento sensor de estacionamento Ibertec (20)
Principio básico de funcionamento sensor de estacionamento Ibertec
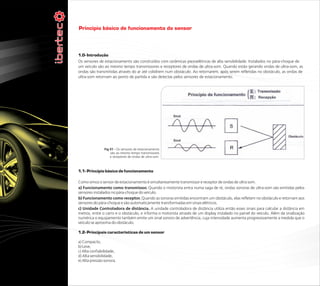
- 1. Princípio básico de funcionamento do sensor 1.0- Introdução Os sensores de estacionamento são construídos com cerâmicas piezoelétricas de alta sensibilidade. Instalados no pára-choque de um veículo são ao mesmo tempo transmissores e receptores de ondas de ultra-som. Quando estão gerando ondas de ultra-som, as ondas são transmitidas através do ar até colidirem num obstáculo. Ao retornarem, após serem refletidas no obstáculo, as ondas de ultra-som retornam ao ponto de partida e são detectas pelos sensores de estacionamento. Fig 01 - Os sensores de estacionamento são ao mesmo tempo transmissores e receptores de ondas de ultra-som. 1.1- Principio básico de funcionamento Como vimos o sensor de estacionamento é simultaneamente transmissor e receptor de ondas de ultra som. a) Funcionamento como transmissor. Quando o motorista entra numa vaga de ré, ondas sonoras de ultra-som são emitidas pelos sensores instalados no pára-choque do veículo. b) Funcionamento como receptor. Quando as sonoras emitidas encontram um obstáculo, elas refletem no obstáculo e retornam aos sensores do pára-choque e são automaticamente transformadas em sinais elétricos. c) Unidade Controladora de distância. A unidade controladora de distância utiliza então esses sinais para calcular a distância em metros, entre o carro e o obstáculo, e informa o motorista através de um display instalado no painel do veículo. Além da sinalização numérica o equipamento também emite um sinal sonoro de advertência, cuja intensidade aumenta progressivamente a medida que o veículo se aproxima do obstáculo. 1.2- Principais características de um sensor a) Compacto, b) Leve, c) Alta confiabilidade, d) Alta sensibilidade, e) Alta pressão sonora.
- 2. Princípio básico de funcionamento do sensor 2.0- Comprimento de onda A velocidade de propagação de uma onda qualquer pode ser calculada multiplicando-se o comprimento de onda pela freqüência. A velocidade de propagação de uma onda sonora no ar a 20°C é de 344m/s e de uma onda eletromagnética 3x108m/s. V = λ . f (m/s) Tipo de Onda Frequência Velocidade Cálculo do Comprimento de onda Comprimento de onda Sonora f = 20.000Hz V = 344m/s λ = V ÷ f = 344 ÷ 20.000 = λ = 0,0172 metros 8 Eletromagnética f = 20.000Hz V = 3x10 m/s λ = V ÷ f = 300.000.000 ÷ 20.000 = λ = 15.000 metros Como podemos observar na tabela acima, quanto mais baixa a velocidade menor será o comprimento de onda. O que equivale dizer que quanto mais baixo for o comprimento de onda, mais fácil será a detecção da direção da onda e a medição da distância. Mais preciso também será a medição de obstáculos de grandes dimensões. 3.0- Propagação de ondas sonoras As ondas sonoras se propagam no ar resumidamente da seguinte maneira 3.1 - Frente de onda Quando as ondas sonoras se propagam num meio defini-se como frente de onda a todos pontos do meio que são atingidos pela onda que se propaga. A frente de onda separa a região perturbada da região ainda não perturbada. Frente de onda plana Frente de onda esférica Fig 02 - Tipos de frentes de ondas
- 3. Princípio básico de funcionamento do sensor 3.2 - Reflexão de ondas. Quando uma frente de onda incide sobre um obstáculo, cada ponto da frente reflete-se, então é possível representá-las por seus raios de onda. Fig 03 - Obstáculo plano, raio incidente e raio refletido 3.3- Atenuação da onda A intensidade de uma onda de ultra-som, que se propaga através do ar, atenua proporcionalmente com a distância e com a frequência. Como mostra a figura 04, quanto mais alta a freqüência, maior será a taxa de atenuação e menor será a distância de alcance da onda. Uma onda de 20Khz após percorrer 10 metros atenua sua intensidade em - 40dB. Uma onda de 200Khz após percorrer 5 metros atenua sua intensidade em - 60dB. Figura 04 – Atenuação da pressão sonora de uma onda em função da distância e da frequência
- 4. Princípio básico de funcionamento do sensor 4.0- Tipos do material e da geometria do obstáculo Como dissemos anteriormente uma das aplicações práticas da utilização de cerâmicas piezoelétricas é a detecção da presença de obstáculos atrás de um automóvel através da medição do retorno das ondas de ultra-som refletidas num objeto. A reflexão das ondas de ultra-som depende, entretanto da geometria e do tipo do material que compõe o obstáculo. a) Material não absorvente : tais como metal, madeira, concreto, vidro, borracha, papel, etc, são facilmente detectáveis pelo sensor piezoelétrico porque refletem 100% das ondas de ultra-som. b) Material absorvente : tais como algodão, lã, etc, são mais difíceis de serem detectados porque absorvem a energia das ondas de ultra-som. c) Geometria : além da reflexão das ondas depender do tipo de material, dependem também da geometria do obstáculo. Objetos com ondulações ou superfícies irregulares podem ser difíceis de serem detectados devido à reflexão irregular das ondas. Nesta situação as ondas refletidas podem não retornar exatamente ao ponto de partida e serem direcionadas para fora do alcance dos sensores piezoelétricos. 5.0- Tipos de obstáculos Existem basicamente dois tipos de obstáculos os com superfície plana e os com superfície curva. Além de planos e curvos os obstáculos também podem ser reflexivos ou absorventes. a) Obstáculo reflexivo. São aqueles que refletem facilmente as ondas sonoras. Por exemplo um muro de alvenaria ou a carroceria de um carro. b) Obstáculo absorvente. São aqueles que absorvem totalmente ou parcialmente as ondas sonoras. Por exemplo um animal ou uma pessoa. 5.1 - Obstáculo Plano. A reflexão das ondas sonoras acontece como se fosse refletida em um espelho colocado perpendicularmente no ponto de incidência. Reflexão sonora é o fenômeno que consiste no fato do som voltar a se propagar no meio de origem, após incidir sobre um obstáculo. Fig 05 - Obstáculo plano, onda circular incidente e onda circular refletida
- 5. Princípio básico de funcionamento do sensor 5.2 - Obstáculo Curvos Fig 06 - Obstáculo convexo, onda incidente e onda refletida Fig 07 - Obstáculo concavo, onda incidente e onda refletida Fig 08 - Obstáculo convexo, onda incidente e onda refletida Fig 09 - Obstáculo concavo, onda incidente e onda refletida
- 6. Princípio básico de funcionamento do sensor 5.3 - Obstáculo de material absorvente As ondas sonoras podem não se refletir como o esperado e desejado em obstáculos construídos ou revestidos com materiais absorventes de energia acústica tais como material multiperfurado, algodão, cortiça, isopor, tecido de lã, animais, seres humanos, etc. Fig 10 - Obstáculo de material absorvente 6.0- Entendendo o funcionamento de um sensor de estacionamento Toda vez que o motorista engata a ré, o sensor de estacionamento liga automaticamente e emite um sinal sonoro de “bip”. Instantaneamente os sensores começam a emitir ondas sonoras de ultra-som para varrer a área atrás do veículo em busca de algum obstáculo até X metros de distância. A distância máxima de captação varia de equipamento para equipamento. Quando o câmbio retorna para “ponto morto” o sensor de estacionamento desliga automaticamente. 6.1- Varredura no plano vertical da área atrás do veículo O ângulo de cobertura no plano vertical do sensor de estacionamento da figura abaixo é de 60°. Quanto maior esse ângulo maior a possibilidade de detectar um obstáculo no plano vertical. Fig 11 - Ângulo de cobertura do sensor no plano vertical
- 7. Princípio básico de funcionamento do sensor 6.2- Varredura no plano horizontal da área atrás do veículo O ângulo de cobertura no plano horizontal do sensor de estacionamento da figura abaixo é de 60°. Quanto maior esse ângulo maior a possibilidade de detectar um obstáculo no plano horizontal. Quanto mais próximo um sensor estiver do outro maior a possibilidade da área de cobertura de um se sobre a área do outro. Por outro lado quanto mais distante um sensor ficar do outro maior a possibilidade de criarmos uma zona morta, um área sem cobertura atrás do veículo. Fig 12 - Ângulo de cobertura do sensor no plano horizontal 6.3- Efeitos da Temperatura A velocidade de propagação de uma onda sonora "C" é expressa pela seguinte fórmula ; C = 331,5 + 0,667T(m/s) onde T é a temperatura em (°C). Para medir com precisão a distância de um obstáculo é necessário verificar antes a temperatura do local. Pois a velocidade do som varia de acordo com a temperatura- circunferência preferencial. 6.4- Indicação numérica da distância Após fazer a varredura dos planos horizontal e vertical o sensor de estacionamento informa num display quantos metros falta para o veiculo colidir com o obstáculo. Informa também se o obstáculo esta no centro, se esta a esquerda ou se esta a direita do pára-choque. 6.5- Alerta sonoro de perigo A medida que o veículo vai se aproxima de um obstáculo o sensor de estacionamento emite um sinal sonoro de advertência “bip”. A medida que a distância entre o veículo e o obstáculo vai diminuindo o som do “bip” vai ficando mais rápido. Quando o sensor emitir um sinal “bip” contínuo de advertência o motorista deverá parar o veiculo imediatamente porque se encontra numa zona perigosa de colisão.
- 8. Princípio básico de funcionamento do sensor 7.0- Princípio de funcionamento e de construção de um sensor piezoelétrico 7.1- Funcionamento Quando uma tensão elétrica é aplicada numa cerâmica piezoelétrica, ela gera uma distorção mecânica no material proporcional a voltagem e a freqüência aplicadas. Por outro lado, quando uma vibração mecânica é aplicada na cerâmica piezoelétrica, ela gera uma carga elétrica. 7.2- Construção Quando um sinal elétrico é aplicado no vibrador ( Horn ) da cápsula ( case ), construído com uma ou duas folhas de cerâmica piezoelétrica e uma placa de metal ( Metal plate ), é gerada uma vibração mecânica que passa a irradiar no ambiente ondas sonoras de ultra-som. De modo inverso, quando uma vibração mecânica é aplicada no vibrador ( Horn ) da cápsula ( case ), ele gera um sinal elétrico. É devido a essas propriedades que as cerâmicas piezoelétricas podem ser utilizadas como sensores de estacionamento. Figura 13 – Estrutura construtiva típica de um sensor tipo aberto 7.3- Estrutura de um sensor de ultra-som tipo fechado Este tipo de sensor é utilizado em aplicações para uso externo como é o caso dos sensores de estacionamento também conhecidos como sensores de ré. Neste tipo de aplicação, mostrado na figura 14, a parte externa da cápsula do sensor é fechada para proteger o sistema interno do orvalho, da chuva e da poeira. A cerâmica piezoelétrica é fixada na parede interna superior da caneca de metal (case metal). Os dois fios do cabo externo (cable) são ligados na base da blindagem (base shielding). A base por sua vez é ligada na caneca metálica (metal case) e na cerâmica piezoelétrica através de outros dois fios (lead wire). A parte inferior da caneca metálica é preenchida com resina para proteger o circuito interno da chuva e poeira Figura 14 – Estrutura construtiva típica de um sensor tipo fechado
- 9. Princípio básico de funcionamento do sensor 7.4- Sensor de estacionamento desmontado Fig 15 – Componentes internos de um sensor de estacionamento desmontado Fig 16 – Dependendo da qualidade o sensor pode ter mais ou menos componentes internos. Fig 17 - Para evitar que a entrada de água danifique os componentes internos o sensor é selado com silicone.