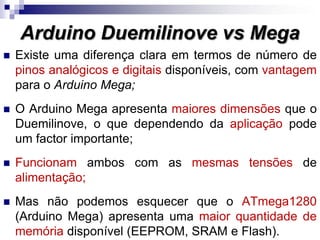
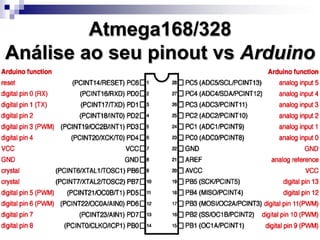
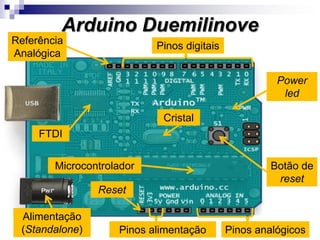
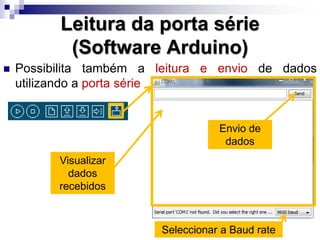
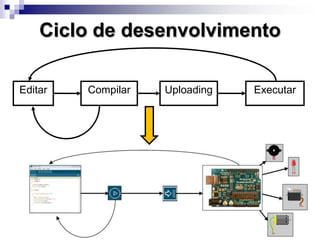
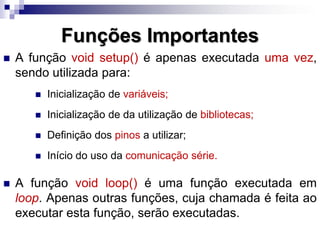
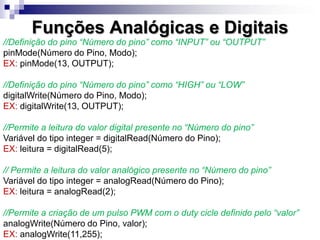
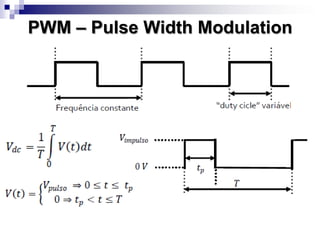
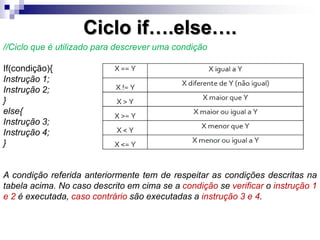
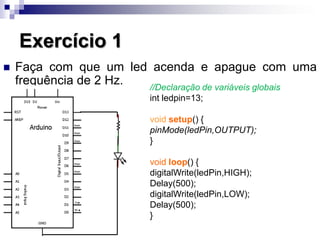
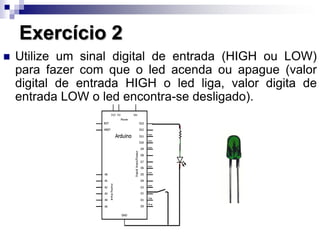
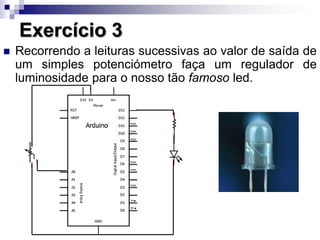
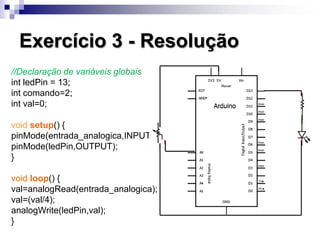
O documento introduz o Arduino, uma plataforma de desenvolvimento de hardware e software open-source. Discute as características e componentes do Arduino, incluindo microcontroladores, software de desenvolvimento e exemplos de código. Também fornece instruções básicas sobre como programar e usar o Arduino.