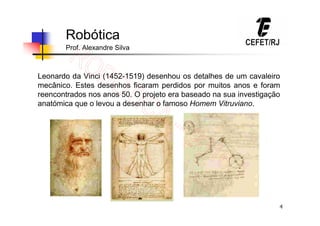
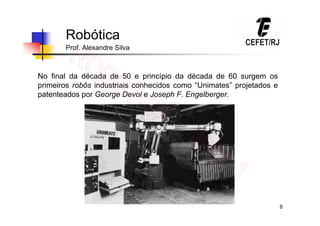
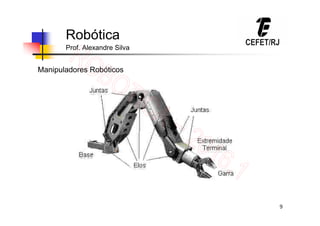
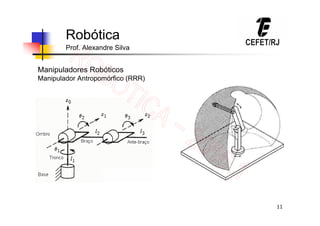
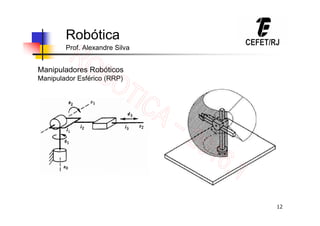
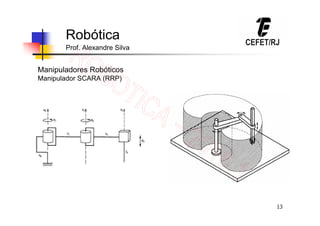
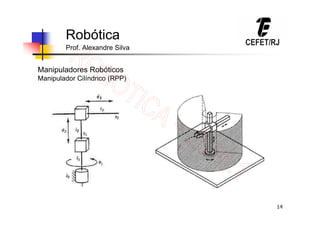
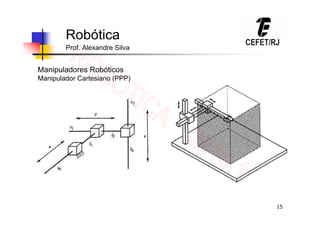
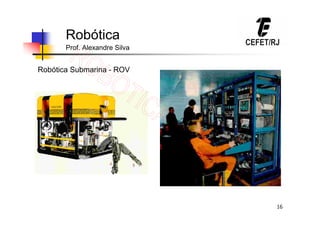
O documento apresenta um resumo sobre robótica, abordando: 1) A definição de robô e sua origem histórica desde desenhos de Leonardo da Vinci até os primeiros robôs industriais; 2) Principais componentes de um robô como sensores e atuadores; 3) Tipos de manipuladores robóticos e suas aplicações; 4) Leis da robótica de Isaac Asimov.