O documento descreve microcontroladores PIC, especificamente:
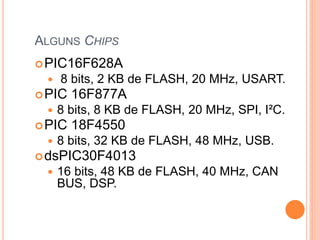
1) Apresenta os microcontroladores PIC da Microchip, destacando seus modelos como PIC16F628A, PIC16F877A, PIC18F4550 e dsPIC30F4013.
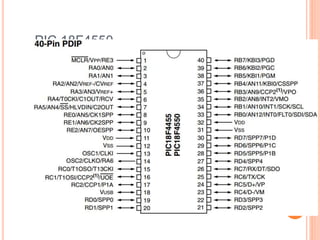
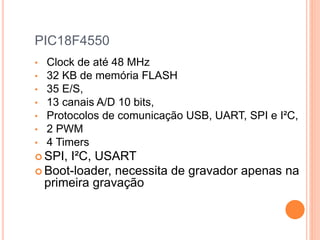
2) Explica que o PIC18F4550 possui 32KB de memória flash, 35 pinos de E/S e protocolos como USB, UART, SPI e I2C.