Transferir como PDF, PPTX
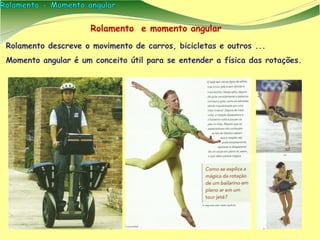
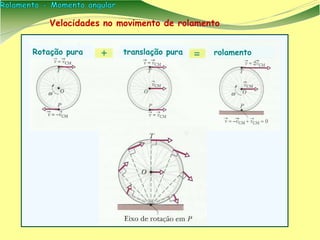
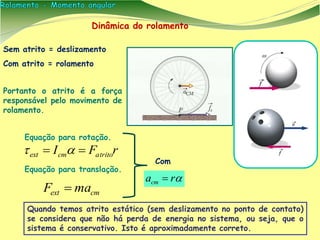
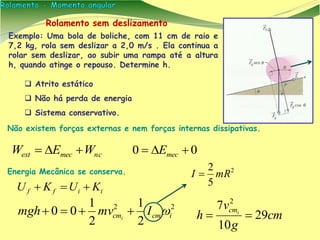
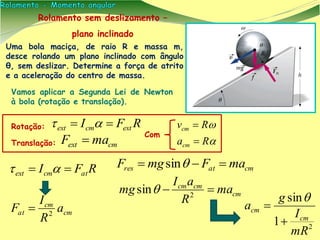
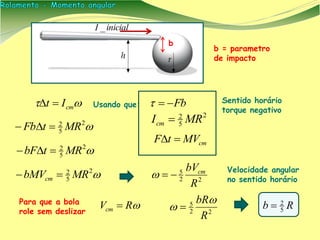
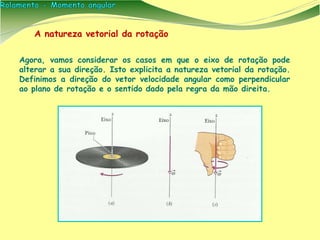
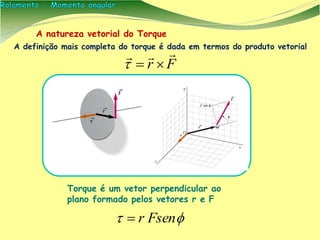
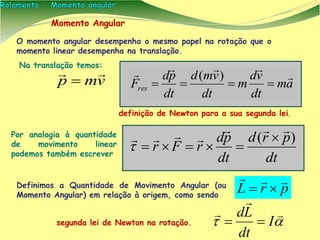
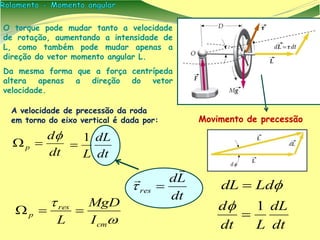
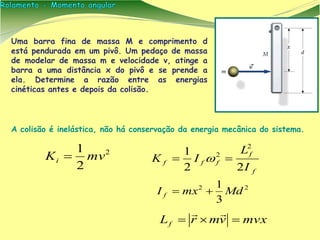

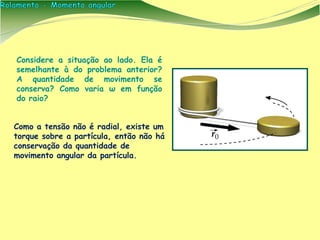

[1] O documento apresenta conceitos de física sobre rolamento e momento angular, que descrevem o movimento de objetos rolando sem deslizar. [2] É introduzido o conceito de momento angular como análogo à quantidade de movimento para rotações, e discutidas suas propriedades vetoriais. [3] São mostrados exemplos de cálculos envolvendo rolamento, incluindo de uma bola em uma rampa e de objetos rolando sem deslizar.




















































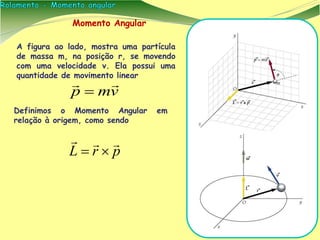
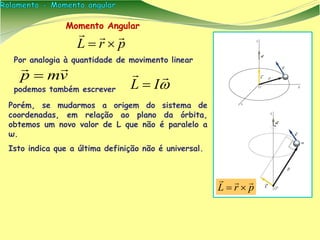
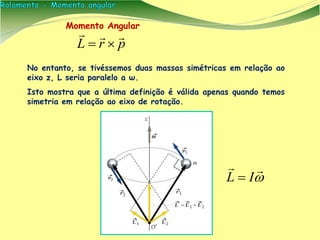
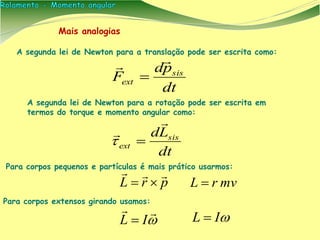
![AULÃO TERMODINÂMICA 2 - CALORIMETRIA [Salvo automaticamente].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/aulotermodinmica2-calorimetriasalvoautomaticamente-240608145259-2784f283-thumbnail.jpg?width=640&height=640&fit=bounds)



![00. como resolver_problemas_de_física[1]](https://cdn.slidesharecdn.com/ss_thumbnails/00-140522182407-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



















